Route Server
Source code on Github.
The Route Server in nav2_route implements the server for computing routes through a predefined navigation graph rather than using freespace planning like the Planner Server.
It may be used to fully replace freespace planning when following a particular route closely or to augment the global planner with long-distance routing to a goal.
In this case, the planner will generate feasible paths with localized environmental information for only the future part of the route necessary.
The graph itself has very few rules associated with it, but may be generated manually or automatically via AI, geometric, or probabilistic techniques. See Route Graph Generation and Route Graph Generation LIF Editor for a tutorial about how to generate a graph using QGIS, Rviz2 and/or LIF for structured environment applications. You can also use sampling or procedural generation techniques to create a graph for less structured environments, for example using NVIDIA’s SWAGGER project which can generate a graph from a map image and provides utilities to convert into geojson for easy integration with Nav2 Route. There’s also a tutorial SWAGGER Route Graph Generation to help with that process as well.
There are also several locations for customization using plugins: * Edge Scorer: Enables custom scoring functions for edges based on arbitrary user-defined semantic information and the chosen optimization criteria(s). * Route Operation: Execute a user-defined action when entering or leaving a route edge or achieving a node, including use of node and edge semantic information, * Route Graph Parser: Parse graph files using the chosen format (e.g. geoJSON, OpenStreetMap, etc.) and convert them into the internal graph representation.
See the package’s README file for additional information such as performance metrics, design, advice, and graph formatting.
Server Parameters
- base_frame
Type
Default
string
“base_link”
- Description
The base frame of the robot to use to obtain the robot’s pose from when not using the
use_startrequest parameter.
- route_frame
Type
Default
string
“map”
- Description
The frame of the route graph to plan within. If values in the graph file are not w.r.t. this frame, they will be automatically transformed.
- path_density
Type
Default
double
0.05
- Description
The density of path-points in the output route, if using the
nav_msgs/Pathroute rather than the collection of nodes and edges. This is used to upsample the route into a path that may be followed.
- max_iterations
Type
Default
int
0
- Description
The maximum number of planning iterations to perform. If 0, the maximum number of iterations is used.
- max_planning_time
Type
Default
double
2.0
- Description
The maximum planning time to use.
- smooth_corners
Type
Default
bool
false
- Description
Whether to smooth corners formed between subsequent edges after a route has been found
- smoothing_radius
Type
Default
double
1.0
- Description
Radius to fit to corners formed by edges if corner smoothing is enabled
- smoothing_angle_threshold
Type
Default
double
2.9
- Description
Angle threshold (rad). If angle > threshold, no smoothing is applied. This prevents unnecessary smoothing of largely straight segments caused by small differences or annotation error. 2.9 rad is 166 deg, meaning it will not smooth for segments that are within 14 deg of straight anti-parallel.
- costmap_topic
Type
Default
string
‘global_costmap/costmap_raw’
- Description
The costmap to use for the server-level costmap subscriber. This is created to aid the goal intent extractor (if BFS-based terminal route node finding is enabled) and also shared with the Collision Monitor Operation and Costmap Edge Scorer if set to the same topic. Otherwise, those plugins will create their own subscribers to their respective costmap topics.
- tracker_update_rate
Type
Default
double
50.0
- Description
The update rate of the tracker (when using
ComputeAndTrackRouteaction) to check the status of path tracking and execute route operations.
- aggregate_blocked_ids
Type
Default
bool
false
- Description
Whether to aggregate the blocked IDs reported by route operations over the lifespan of the navigation request or only use the currently marked blocked IDs.
- boundary_radius_to_achieve_node
Type
Default
double
1.0
- Description
The radius at a boundary condition (start, goal) to mark the node achieved by the tracker when using
ComputeAndTrackRoute. Note that this is not the same as the goal tolerance, as the route or path follower (controller) will continue to run until its goal tolerance is met.
- radius_to_achieve_node
Type
Default
double
1.0
- Description
The radius for non-boundary conditions to mark the node as achieved once within tolerance of, when using
ComputeAndTrackRoute. Note that this is a radius to consider achievable, however a refinement process takes place to most accurately identify when a node is reached. The radius is the trigger to start this process. Set this generously based on path tracking tolerances.
- max_prune_dist_from_edge
Type
Default
double
8.0
- Description
Maximum distance from an edge to consider pruning it as in-progress (i.e. if we’re to far away from an edge, it is nonsensical to prune it).
- min_prune_dist_from_goal
Type
Default
double
0.15
- Description
Minimum distance from the goal node away from the request’s goal pose (if using
use_poses) to consider pruning as being passed, in case the goal pose is very close to the goal node, but is not exact.
- min_prune_dist_from_start
Type
Default
double
0.1
- Description
Minimum distance from the start node away from the start pose (if using
use_poses) to consider pruning as being passed, in case the start pose is very close to the start node, but is not exact. Setting this to be ~3-5x the goal tolerance may be a good choice when doing largely on-graph navigation to connect from the start node near the robot to the route fully without pruning.
- prune_goal
Type
Default
bool
true
- Description
Whether pruning the goal node from the route due to it being spatially past the goal pose requested (pose requests only
use_poses).
- enable_nn_search
Type
Default
bool
true
- Description
Whether to use Breadth-first search to find the nearest traversable node (true) or simply the nearest node (false) for the start and goal when using pose requests.
- max_nn_search_iterations
Type
Default
int
10000
- Description
The maximum number of iterations to perform Breadth-first search to find the start and goal closest traversable nodes.
- num_nearest_nodes
Type
Default
int
5
- Description
The number of nearest-neighbors to extract from a Kd-tree in order to check against in the Breadth-first search.
- graph_filepath
Type
Default
string
“”
- Description
The filepath to the graph file for loading. It may be empty on initialization, but then the graph must be set from the server’s set graph service later.
- graph_file_loader
Type
Default
string
“GeoJsonGraphFileLoader”
- Description
The name of the graph file loader plugin to use.
- graph_file_loader.plugin
Type
Default
string
“nav2_route::GeoJsonGraphFileLoader”
- Description
The graph loading plugin to use. By default, we use
geojson.
- edge_cost_functions
Type
Default
vector<string>
[“DistanceScorer”, “DynamicEdgesScorer”]
- Description
Which edge cost functions should be used for planning purposes to score the edges. By default, we optimize for minimum distance while providing a service cost function to set arbitrary costs or mark edge as closed from a service.
- operations
Type
Default
vector<string>
[“AdjustSpeedLimit”, “ReroutingService”]
- Description
The route operation plugins to use for
ComputeAndTrackRoute. By default, we have a speed limit adjuster and a ROS service request rerouting operation.
- <name>.plugin
Type
Default
string
“”
- Description
The plugin to load under that name. The
edge_cost_functions.<name>namespaces is also where plugin-specific parameters are defined.
- introspection_mode
Type
Default
string
“disabled”
- Description
The introspection mode for services and actions. Options are “disabled”, “metadata”, “contents”.
- allow_parameter_qos_overrides
Type
Default
bool
true
- Description
Whether to allow QoS profiles to be overwritten with parameterized values.
Edge Scorer Parameters
CostmapScorer
This edge scoring plugin will score based on the cost of the costmap over the edge.
- weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- costmap_topic
Type
Default
string
global_costmap/costmap_raw
- Description
Costmap topic to use for scoring.
- max_cost
Type
Default
double
253.0
- Description
Maximum cost to consider an route blocked (253.0)
- use_maximum
Type
Default
bool
true
- Description
Whether to score based on single maximum or average
- invalid_on_collision
Type
Default
bool
true
- Description
Whether to consider collision status as a terminal condition
- invalid_off_map
Type
Default
bool
true
- Description
Whether to consider route going off the map invalid
- check_resolution
Type
Default
int
1
- Description
Resolution to check costs at (1 = costmap resolution, 2 = 2x costmap resolution, etc)
DistanceScorer
This edge scoring plugin will score based on the length of the edge.
If a speed_tag is provided, that is used to scale by the time to traverse.
This must be a percentage, if using absolute speed limits, see the TimeScorer plugin below.
- weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- speed_tag
Type
Default
string
“speed_limit”
- Description
Graph metadata key to look for percentage speed limits (speed_limit).
TimeScorer
This edge scoring plugin will score based on the time to traverse the length of the edge. This will use the distance of the edge weighted in proportion to the absolute speed limits of the robot over an edge. If none is set in the graph, a parameterized maximum speed will be used. If an actual, measured time of a previous traversal is in the edge’s metadata, this will be used.
- weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- speed_tag
Type
Default
string
“abs_speed_limit”
- Description
Graph metadata key to look for absolute speed limits.
- time_tag
Type
Default
string
“abs_time_taken”
- Description
Graph metadata key to look for abs traversal times.
- max_vel
Type
Default
double
0.5
- Description
Maximum velocity to use if speed limit or time taken is not set.
PenaltyScorer
This edge scoring plugin will score based on a statically set penalty in the graph file for a particular edge. This can be based on application known logic to weight preferences of navigation tactics in a space.
- weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- penalty_tag
Type
Default
string
“penalty”
- Description
Graph metadata key to look for penalty value.
SemanticScorer
This edge scoring plugin will score based on semantic information provided in the graph file. It can either check for the edge’s semantic class via a parameterized key’s value or search all key names to match known semantic classes to apply weight (e.g. class: highway or highway: <some other application info>).
- weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- semantic_classes
Type
Default
vector<string>
[]
- Description
The list of semantic classes in your graph that you would like to score based off of.
- <for each class>
Type
Default
double
N/A
- Description
The cost to assign to this semantic class. For example:
highway: 8.4.
- semantic_key
Type
Default
string
class
- Description
The key to search for edge’s semantic data with the edge’s metadata. If empty string, will look at key names instead.
StartPoseOrientationScorer
This edge scoring plugin will score an edge starting at the start node (vector from start->goal) based on its angular proximity to the starting pose’s orientation. This will either score a weighted-angular distance or reject traversals that are outside of a set threshold to force the route to go down a particular direction (i.e. direction robot is already facing).
- orientation_weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- use_orientation_threshold
Type
Default
bool
false
- Description
Whether to use the orientation threshold for binary validity of traversal or weighted-angular distance scoring.
- orientation_tolerance
Type
Default
double
PI/2
- Description
The angular threshold to reject edges’ angles if greater than this w.r.t. starting pose, when
use_orientation_threshold: true.
GoalPoseOrientationScorer
This edge scoring plugin will score a an edge with terminus of the goal node (vector from start->goal) based on its angular proximity to the goal pose’s orientation. This will either score a weighted-angular distance or reject traversals that are outside of a set threshold to force the route to go down a particular direction (i.e. direction robot wants to be facing).
- orientation_weight
Type
Default
double
1.0
- Description
Relative edge scoring weighting.
- use_orientation_threshold
Type
Default
bool
false
- Description
Whether to use the orientation threshold for binary validity of traversal or weighted-angular distance scoring.
- orientation_tolerance
Type
Default
double
PI/2
- Description
The angular threshold to reject edges’ angles if greater than this w.r.t. goal pose, when
use_orientation_threshold: true.
DynamicEdgesScorer
This edge scoring plugin will score based on the requested values from a 3rd party application via a service interface. It can set dynamically any cost for any edge and also be used to close and reopen particular edges if they are blocked, in use by other robots locking out its shared use by other robots, higher cost due to overlap with other platforms in service, increased cost due to fleet manager analytics that this space is underperforming throughput, or otherwise temporarily non-traversable. For example, if other robots report an edge to be blocked, all robots can avoid this edge/aisle/etc.
It has no parameters.
Route Operations Parameters
AdjustSpeedLimit
This route operation will check the graph at each state change (e.g. node passed) if the new edge entered contains speed limit restrictions. If so, it will publish those to the speed limit topic to be received by the controller server.
- speed_limit_topic
Type
Default
string
speed_limit
- Description
The topic to publish new speed limits to.
- speed_tag
Type
Default
string
speed_limit
- Description
The graph’s semantic metadata key to look for speed limits under.
CollisionMonitor
This route operation will evaluate a future-looking portion of the route for validity w.r.t. collision in the costmap.
If it is blocked, it sets the edge blocked as blocked for rerouting around the blocked edge or fail the action based on reroute_on_collision.
- costmap_topic
Type
Default
string
“global_costmap/costmap_raw”
- Description
The costmap topic to use for collision checking. May be local or global costmap depending on the desired collision checking horizon. If set to the same as the server’s costmap topic, then it will be shared here as well without duplicate subscriptions.
- rate
Type
Default
double
1.0
- Description
The rate to collision at, rather than the tracker’s update rate since this is an expensive operation.
- max_cost
Type
Default
double
253.0
- Description
The cost at or above which is considered invalid.
- max_collision_dist
Type
Default
double
5.0
- Description
The distance (meters) ahead of the robot’s position on the route to collision check during.
- check_resolution
Type
Default
int
1
- Description
The resolution to check at in terms of multiples of the costmap’s resolution (1 = 1 cell, 2 = every 2 cells, and so on). This reduces the computational complexity for long-range routes.
- reroute_on_collision
Type
Default
bool
true
- Description
Whether to reroute on collision or exit the tracking task as a failure when future collision is detected.
TimeMarker
This route operation will track times taken to traverse particular edges to write times to for later improved navigation time estimation in edge scoring.
- time_tag
Type
Default
string
abs_time_taken
- Description
Metadata tag to write the time taken to within an edge. Is used with the
TimeScorerto give an improved experiential estimate of traversal times.
ReroutingService
This route operation will receive service requests from a 3rd party application to cause a rerouting request.
TriggerEvent
This route operation will trigger an external service when a graph node or edge contains a route operation of this name. It uses a std_srvs/Trigger interface and is a demonstration of the RouteOperationClient<SrvT> base class which can be used to trigger other events of other types of other names as desired (opening doors, calling elevators, etc).
Example
route_server:
ros__parameters:
base_frame: "base_link" # Robot's base frame
route_frame: "map" # Global reference frame
path_density: 0.05 # Density of points for generating the dense nav_msgs/Path from route (m)
max_iterations: 0 # Maximum number of search iterations, if 0, uses maximum possible
max_planning_time: 2.0 # Maximum planning time (seconds)
smoothing_corners: true # Whether to smooth corners formed by adjacent edges or not
smoothing_radius: 1.0 # Radius of corner to fit into the corner
graph_file_loader: "GeoJsonGraphFileLoader" # Name of default file loader
plugin: nav2_route::GeoJsonGraphFileLoader # file loader plugin to use
graph_filepath: "" # file path to graph to use
edge_cost_functions: ["DistanceScorer", "DynamicEdgesScorer"] # Edge scoring cost functions to use
DistanceScorer:
plugin: "nav2_route::DistanceScorer"
DynamicEdgesScorer:
plugin: "nav2_route::DynamicEdgesScorer"
operations: ["AdjustSpeedLimit", "ReroutingService"] # Route operations plugins to use
AdjustSpeedLimit:
plugin: "nav2_route::AdjustSpeedLimit"
ReroutingService:
plugin: "nav2_route::ReroutingService"
tracker_update_rate: 50.0 # Rate at which to check the status of path tracking
aggregate_blocked_ids: false # Whether to aggregate the blocked IDs reported by route operations over the lifespan of the navigation request or only use the currently blocked IDs.
boundary_radius_to_achieve_node: 1.0 # Radius (m) near boundary nodes (e.g. start/end) to enable evaluation of achievement metric
radius_to_achieve_node: 2.0 # Radius (m) near route nodes as preliminary condition for evaluation of achievement metric
max_prune_dist_from_edge: 8.0 # Max distance from an edge to consider pruning it as in-progress (e.g. if we're too far away from the edge, its nonsensical to prune it)
min_prune_dist_from_goal: 0.15 # Min distance from goal node away from goal pose to consider goal node pruning as considering it as being passed (in case goal pose is very close to a goal node, but not exact)
min_prune_dist_from_start: 0.10 # Min distance from start node away from start pose to consider start node pruning as considering it as being passed (in case start pose is very close to a start node, but not exact)
prune_goal: true # Whether pruning the goal nodes from the route due to being past the goal pose requested is possible (pose requests only)
Configuring the Nav2 Route Server Demo
The Nav2 Route Server demo is a simulation of a Turtlebot4 robot navigating through a depot or a warehouse environment using the Nav2 Route Server. The route_example_launch.py file is used to launch the demo, and can be configured in place with the following parameters:
MAP_TYPE:Set to either
depotorwarehouseto choose the environment.
MAP_POSES_DICT:A dictionary containing the Gazebo spawn poses for the robot in the depot and warehouse environments.
ROUTE_POSES_DICT:A dictionary containing the start and goal poses for the robot in the depot and warehouse environments.
All the graphs files for the depot and warehouse environments are located in the graphs directory under the nav2_bringup package.
These are the current visualizations of the route graphs for the depot and warehouse environments:
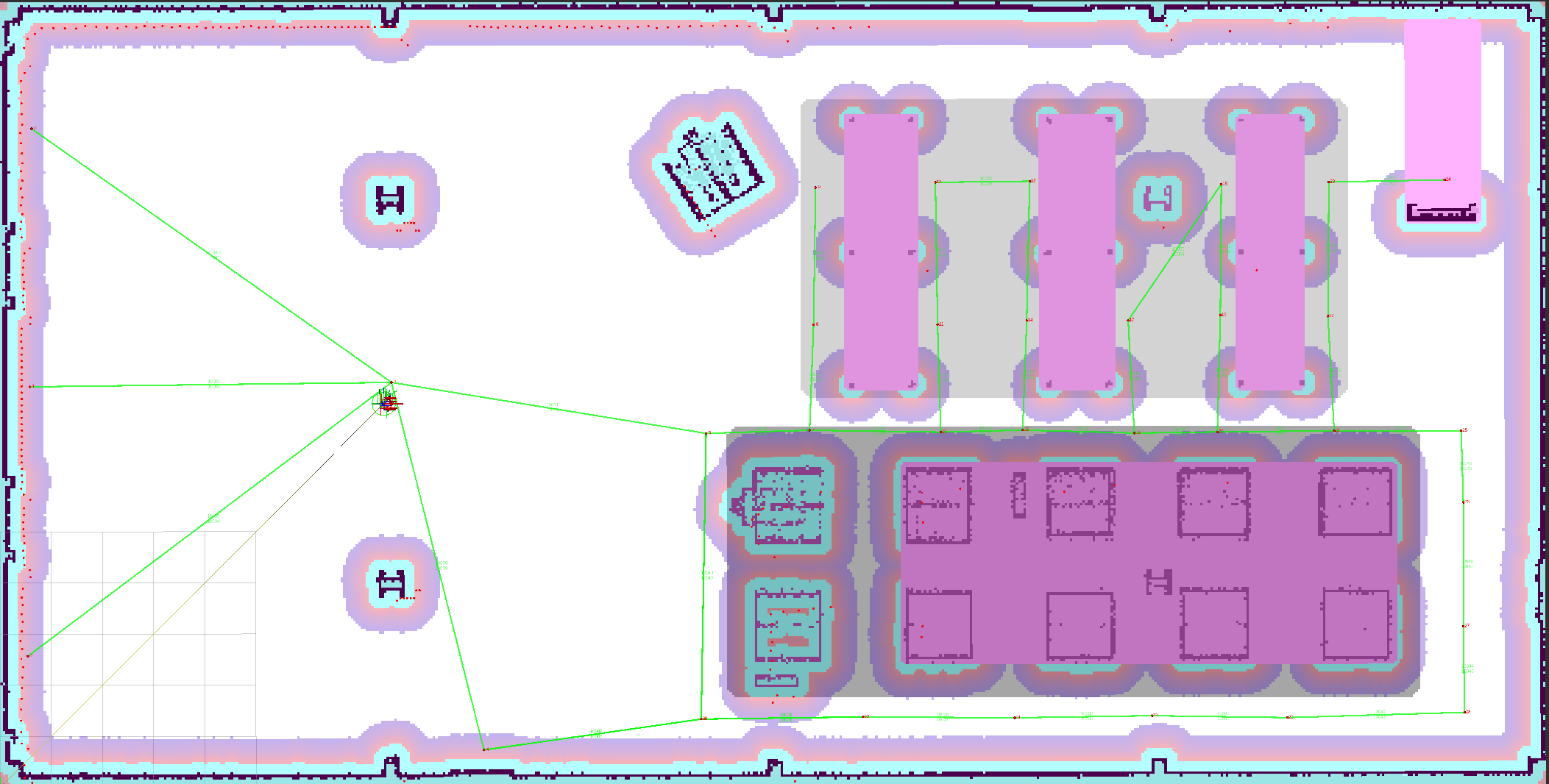
RViz visualization of the bidirectional route graph for the depot environment.
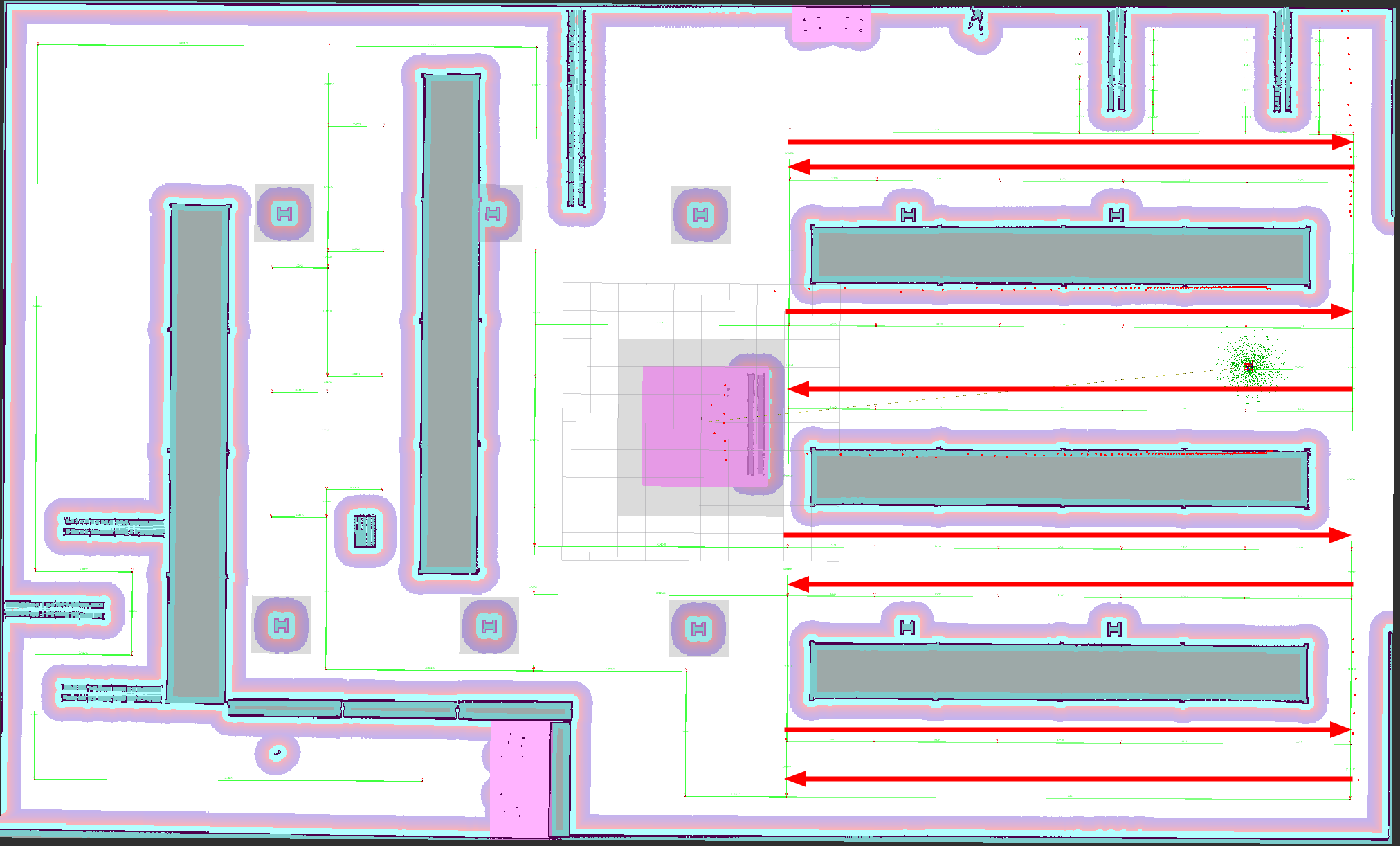
RViz visualization of the route graph for the warehouse environment. All nodes are bidirectional, except the ones that are annotated.