Navigating with Vector Objects
Overview
This tutorial shows how to navigate with vector objects added to raster costmaps. They can be used for various purposes, such as programmatically generating complete occupancy grid maps for navigation, adding virtual static/dynamic obstacles on an existing map, or like Costmap Filters do with rastered maps, but on a vector (polygon or shape) basis rather than annotating a map-sized mask.
In this tutorial, the added vector objects will be treated as obstacles in costmaps using a Keepout Filter.
To do this, we need to prepare the Nav2 stack with the Keepout Filter enabled, along with the Vector Object server which publishes an OccupancyGrid map with the rasterized vector objects as an input mask for the Keepout Filter.
Other use cases use similar principles and could be easily adapted after finishing this tutorial.
Note
Using with Keepout Filter is a good choice for adding virtual obstacles or removing some areas from costmaps. However, the Vector Object server is not restricted to this application. It can be paired with different Costmap Filters for other use cases or even other applications entirely. For example, to represent polygonal speed restriction areas, a polygon-defined room where the camera is to be turned off using the Binary Filter, or using custom spatial / polygon applications.
Requirements
It is assumed ROS 2 and Nav2 dependent packages are installed or built locally. Please follow the instructions in Build and Install. For the best understanding how Keepout Filter works (which is the part of current configuration), it is also recommended to pass through the Navigating with Keepout Zones tutorial.
Configuring Vector Object Server
Vector Object server has its own vector_object_server.launch.py launch-file and preset parameters in the vector_object_server_params.yaml file for demonstration, though its trivial to add this to Nav2’s main launch file if being used in practice.
In this tutorial, we are focusing on the application how to utilize the simple setup allowing to add virtual obstacles on costmaps. For demonstration purposes, let’s specify two obstacle shapes: triangle polygon and circle filled with “occupied” value, in order to prevent the robot to go through them. The YAML-part for polygon and circle will look as follows:
shapes: ["Poly", "Circle"]
Poly:
type: "polygon"
frame_id: "map"
closed: True
value: 100
points: [0.3, 0.5, -0.4, 1.2, -0.4, -0.2]
Circle:
type: "circle"
frame_id: "map"
fill: True
value: 100
center: [1.5, 0.5]
radius: 0.7
Where the triangle polygon is specified by {0.3, 0.5}, {-0.4, 1.2}, {-0.4, -0.2} 3-point shape and the circle has {1.5, 0.5} coordinate of its center with 0.7 meter radius in the map frame.
closed true-value for the polygon and fill for the circle mean that both shapes to be filled the with specified value.
This value is equal to 100 which means “occupied” in OccupancyGrid format.
Note
The frame for vector objects were specified the same as map’s global frame. It was chosen for the simplicity to have static objects on map. However, it is possible to specify the shape in any frame different from global map’s one. For this case, Vector Object server will use dynamic output map processing & publishing, suitable for moving objects.
Note
Each shape is being addressed by UUID, which could be specified manually in a string format. In the demonstration, it was skipped to specify UUID of the shapes in the parameters, so Vector Object server will automatically generate a new one for each shape. The list of UUID could be obtained later by calling GetShapes.srv service.
Costmap Filters require CostmapFilterInfo.msg message to be published along with filter mask (rasterized map with vector shapes).
Costmap Filter Info message is being published by Costmap Filter Info server, which is also launched by the vector_object_server.launch.py script.
The complete vector_object_server_params.yaml YAML-file for the demonstration looks as follows:
vector_object_server:
ros__parameters:
map_topic: "vo_map"
global_frame_id: "map"
resolution: 0.05
default_value: -1
overlay_type: 0
update_frequency: 1.0
transform_tolerance: 0.1
shapes: ["Poly", "Circle"]
Poly:
type: "polygon"
frame_id: "map"
closed: True
value: 100
points: [0.3, 0.5, -0.4, 1.2, -0.4, -0.2]
Circle:
type: "circle"
frame_id: "map"
fill: True
value: 100
center: [1.5, 0.5]
radius: 0.7
costmap_filter_info_server:
ros__parameters:
type: 0
filter_info_topic: "vo_costmap_filter_info"
mask_topic: "vo_map"
base: 0.0
multiplier: 1.0
More detailed information about each Vector Object server parameter and its operating principle could be found on Vector Object Server configuration guide page. Costmap Filter Info server parameters description could be found at Costmap Filter Info Server page.
After Vector Objects and Costmap Filters Info servers were configured, launch them by command from below. Robot should bypass vector obstacles. For the demonstration purposes it is enough to avoid path planning through them.
ros2 launch nav2_map_server vector_object_server.launch.py
Demo Execution
After Vector Object server was launched and Vector Object layer was enabled for the global costmap, run Nav2 stack as written in Getting Started:
ros2 launch nav2_bringup tb3_simulation_launch.py headless:=False
We are using composable nodes technology, so in the console where Vector Object server run the following message should appear:
[leha@leha-PC nav2_ws]$ ros2 launch nav2_map_server vector_object_server.launch.py
[INFO] [launch]: All log files can be found below /home/leha/.ros/log/2023-11-24-13-18-42-257011-leha-PC-18207
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_vo_server' in container 'nav2_container'
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/vector_object_server' in container 'nav2_container'
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/costmap_filter_info_server' in container 'nav2_container'
The last lines mean that all three nodes: Vector Object server, Costmap Filter Info server, and the Lifecycle Manager handling them, were successfully loaded into the Nav2 container nav2_container.
Set the initial pose for the robot, and check that vector objects were appeared on global costmap:

As well as for the Keepout Filter, robot will consider vector objects as obstacles on costmaps and will avoid them:

Working with Vector Objects
During the operation, vector objects can be changed, added or removed. Let’s change triangle shape to the bar.
As was mentioned above, each shape is handled by its own UUID, which is being generated by Vector Object server if it is not specified explicitly in parameters.
To obtain shapes UUID, run the GetShapes.srv service request from the console:
ros2 service call /vector_object_server/get_shapes nav2_msgs/srv/GetShapes
The output is expected to be the as follows:
requester: making request: nav2_msgs.srv.GetShapes_Request()
response:
nav2_msgs.srv.GetShapes_Response(circles=[nav2_msgs.msg.CircleObject(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), uuid=unique_identifier_msgs.msg.UUID(uuid=array([73, 141, 241, 249, 116, 24, 69, 81, 178, 153, 159, 19, 245, 152, 28, 29], dtype=uint8)), center=geometry_msgs.msg.Point32(x=1.5, y=0.5, z=0.0), radius=0.699999988079071, fill=True, value=100)], polygons=[nav2_msgs.msg.PolygonObject(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), uuid=unique_identifier_msgs.msg.UUID(uuid=array([153, 128, 30, 121, 241, 60, 76, 15, 140, 187, 58, 60, 164, 241, 97, 39], dtype=uint8)), points=[geometry_msgs.msg.Point32(x=0.30000001192092896, y=0.5, z=0.0), geometry_msgs.msg.Point32(x=-0.4000000059604645, y=1.2000000476837158, z=0.0), geometry_msgs.msg.Point32(x=-0.4000000059604645, y=-0.20000000298023224, z=0.0)], closed=True, value=100)])
In our case, UUID for triangle polygon will be [153, 128, 30, 121, 241, 60, 76, 15, 140, 187, 58, 60, 164, 241, 97, 39].
Calling AddShapes.srv service will add new shape if no UUID was specified, or given UUID was not found.
If UUID is already existing, the shape will be updated.
The triangle to be changed to the bar polygon with 4 points.
Call the following service request with obtained UUID to do this:
ros2 service call /vector_object_server/add_shapes nav2_msgs/srv/AddShapes "polygons: [{points: [{x: 0.0, y: 1.0}, {x: -0.5, y: 1.0}, {x: -0.5, y: 0.0}, {x: 0.0, y: 0.0}], closed: true, value: 100, uuid: {uuid: [153, 128, 30, 121, 241, 60, 76, 15, 140, 187, 58, 60, 164, 241, 97, 39]}}]"
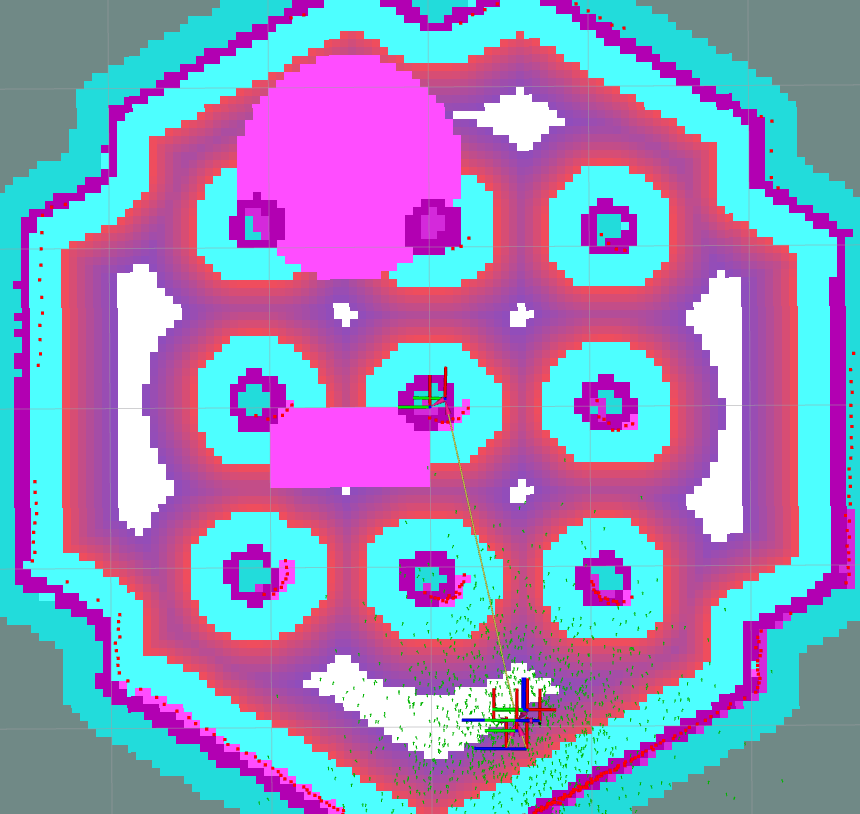
The polygon shape in Vector Object server will be changed, vo_map will be updated and resulting costmap will look as follows - triangle obstacle was updated to bar:
Finally, remove all shapes from map.
To remove any existing shape, there is RemoveShapes.srv service supported. It has array of UUID-s to specify which shapes to remove or just all_objects option for the case if we want to remove all shapes at once. Let’s do the latter:
ros2 service call /vector_object_server/remove_shapes nav2_msgs/srv/RemoveShapes "all_objects: true"
As a result, all vector shapes were disappeared from global costmap:
