Kilted to L-turtle
Moving from ROS 2 Kilted to L-Turtle, a number of stability improvements were added that we will not specifically address here.
Removed Parameter action_server_result_timeout
Removed the parameter action_server_result_timeout from all action servers after resolution within rcl and rclcpp to address early goal removal.
This is not longer required to be set.
Dock Plugin External Detection Rotation
The external detection rotation order of Simple(Non)ChargingDock dock plugins has changed to the more natural Rx -> Ry -> Rz (was: Rz -> Rx -> Ry). From implementation point of view, setEuler() calls have been replaced with setRPY(). The old behavior is retained only when
external_detection_rotation_yawequals 0.0, orexternal_detection_rotation_pitchandexternal_detection_rotation_rollboth equal 0.0
Non-default external detection rotation that differs from the above cases needs to be adjusted appropriately.
Dock Plugin Detector Control
PR #5218 adds on-demand detector control to opennav_docking.
ChargingDock and NonChargingDock now provide pure virtual startDetectionProcess / stopDetectionProcess functions that the docking server invokes around the perception loop.
Custom dock plugins must implement the new hooks (return
trueif nothing extra is required).Simple(Non)ChargingDockgaineddetector_service_name,detector_service_timeout, andsubscribe_toggleparameters so a detector service can be triggered only while detections are needed.See Docking Server for the updated parameter reference and YAML example.
Added Corner Smoothing functionality to route_server
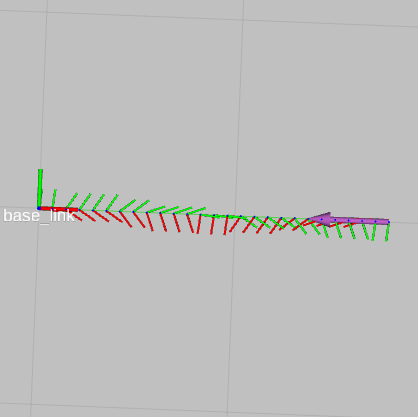
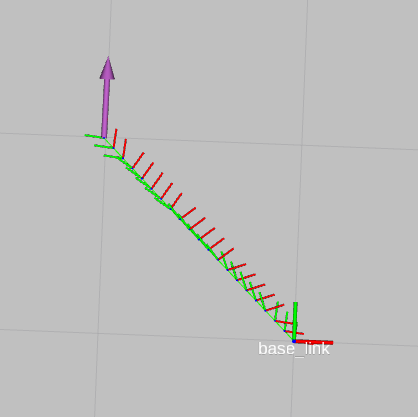
In PR #5226 the ability to stitch two successive edges in route_server with a smooth circular arc has been added. Below is an example of two successive edges forming a corner being smoothed with a radius of one. The red lines are the edges of the route graph and the green line is the resultant path that can be used by a local planner.
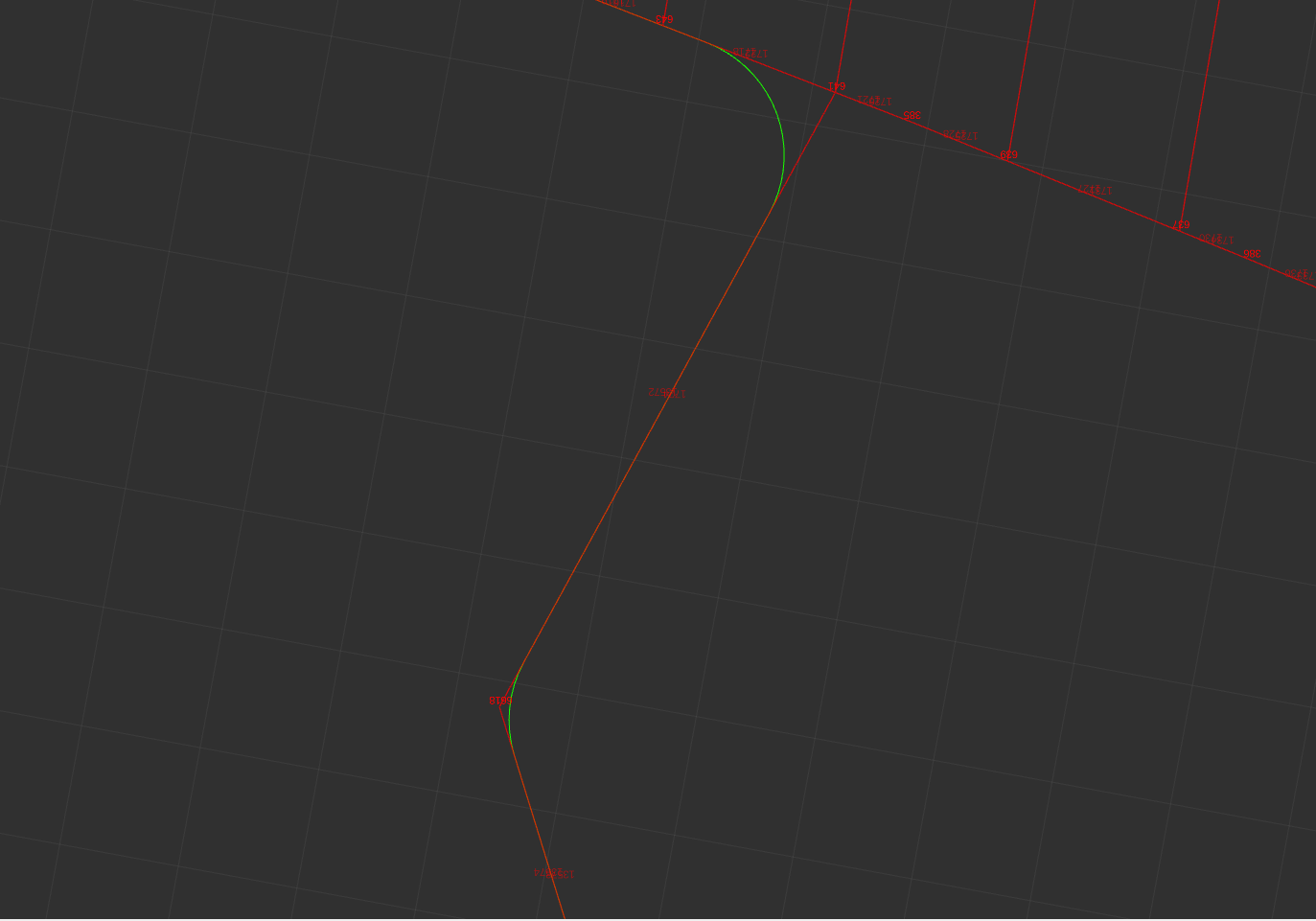
New parameters include smooth_corners which enable or disable corner smoothing and smoothing_radius which specifies the radius of the corner to fit to a corner. The tangents of the starting and ending points of the circular arc will match the tangent of the edges that form the corner. In the event that two edges are basically straight, no corner arc is added and regular linear interpolation is done. In addition to that, if the corner arc requires a starting point and ending point that’s longer than the edge lengths, then it will not add a corner arc.
Added NonblockingSequence Control Node
In PR #5325 a new Nav2 specific behavior tree control node has been added. The new behavior tree control node, NonblockingSequence, allows every child node in the sequence to be ticked through even if one of the child node returns RUNNING. This is done to prevent long running child nodes from blocking the sequence.
For additional details regarding the NonblockingSequence please see the Nav2 specific node walkthrough and NonblockingSequence configuration guide.
MPPI Optimal Trajectory Validator Plugin
The MPPI controller now has a plugin, OptimalTrajectoryValidator, which can be used to validate an output trajectory for execution.
This can be used to check for collisions, margin from obstacles, distance from a path, progress being made, etc.
By default, it uses the DefaultOptimalTrajectoryValidator which checks for collisions.
Note that kinematic and dynamic constraints are not required to be checked as the Optimizer ensures these constraints are met.
Added PersistentSequence and PauseResumeController Control Nodes
In PR #5247 two new Nav2 specific behavior tree control nodes have been added.
The PauseResumeController adds services to pause and resume execution of the tree. Related to this, the PersistentSequence control node allows the child index to be exposed to the behavior tree through a bidirectional port. This allows the sequence to be continued on resume where it was paused.
Option to use point_cloud_transport
In PR #5264, option to use point_cloud_transport has been added. This enables transporting PointClouds using compression libraries (such as Draco, Zstd, Zlib, etc.) to reduce network traffic and work around DDS limitations in low-bandwidth environments.
Default value:
"raw"- Usessensor_msgs/msg/PointCloud2with no compression.
Configuration guide
If your sensor already publishes compressed streams (e.g., Seterolabs ZED X Cameras), you can enable this option in the costmap layers that ingest pointcloud sensor streams (i.e. obstacle, voxel) and in the collision monitor as well.
Example costmap layer configuration:
<costmap_layer>:
observation_sources: pointcloud
pointcloud:
data_type: "PointCloud2"
topic: /intel_realsense_r200_depth/points # Change this to your topic
transport_type: "raw" # Change this to your compressed format (zlib, draco, zstd)
Similarly for the collision monitor config:
collision_monitor:
ros__parameters:
observation_sources: ["pointcloud"]
pointcloud:
type: "pointcloud"
topic: /intel_realsense_r200_depth/points # Change this to your topic
transport_type: "raw" # Change this to your compressed format (zlib, draco, zstd)
See transport_type in Collision Monitor Node for more information.
Performance Metrics
Below are measured bandwidth values for different transport types with default parameters:
Transport Type |
Bandwidth (KB) |
|---|---|
raw |
593.63 |
draco |
443.28 |
zstd |
64.33 |
zlib |
121.95 |
Add BehaviorTree SubTrees Support
The BehaviorTree engine now supports loading SubTrees from multiple files.
This allows you to modularize your behavior trees into smaller components that can be reused across different trees.
The .xml files should be located within directory(s) set through the bt_search_directories parameter.
The interface also supports requesting the desired behavior tree as a filepath or as an ID. To use the ID or multiple SubTrees features, each behavior tree is required to have its own unique ID - replace MainTree with a unique ID.
Option to have custom window size and poly order in Savitsky-Golay Smoother
In PR #5489, option to have custom window size and polynomial order was added. Previously, the implementation used a fixed window size of 7 and a polynomial order of 3.
Default value:
window_size: 7
poly_order: 3
Vector Objects were Supported for Raster Maps
PR #5479 adds new Vector Object server into nav2_map_server package.
It reads vector objects (polygons and polygonal chains as PolygonObject.msg; and circles as CircleObject.msg) from input parameters, handles them by service calls (AddShapes.srv/GetShapes.srv/RemoveShapes.srv) and finally puts them on output raster OccupancyGrid map.
This map is typically used with costmaps by acting as an input mask for Costmap Filters.
This allows to cover such use-cases as:
adding virtual obstacles on maps, dynamic objects simulation/highlighting, hiding some areas or sticking-out robot parts, sensors noise removal, blacking-out areas on maps, adding keep-out or maximum speed restricted areas on vector basis, synthetic testing purposes, and much more.
To run Vector Object server a new vector_object_server.launch.py launch-file is being supplied.
Navigating with Vector Objects tutorial explains how launch Vector Object server and navigate with vector objects added to raster costmaps.
The information about Vector Object server parameters set-up could be found at Vector Object Server configuration guide.
Toggle collision monitor service and BT plugin
PR #5493 and PR #5532 introduce a new toggle service for the collision monitor. This service allows enabling or disabling all collision monitor polygons while keeping sensor checks within the collision monitor active.
The service is defined using a new interface, Toggle.srv:
bool enable
---
bool success
string message
This interface can be extended in the future if needed.
A corresponding Behavior Tree (BT) plugin was also created to call this service.
The plugin is based on BtServiceNode and provides the following input ports:
service_name: name of the toggle serviceserver_timeout: timeout for service callsenable: boolean flag to enable or disable the collision monitor
An example usage in a Behavior Tree XML file:
<ToggleCollisionMonitor enable="false" service_name="collision_monitor/toggle"/>
Following Server
PR #5565 adds a new Following Server into the opennav_following package.
The Following Server implements a server for following dynamic objects or specific reference frames.
This server allows the robot to follow and maintain a determined distance from a detected object or specific frame, using topic-based detection techniques or coordinate frame tracking.
The information about Following Server parameters set-up could be found at Following Server configuration guide.
The tutorial for the Following Server has been recently updated. For the latest instructions and examples, see Dynamic Object Following.
Option for MPPI to use open loop mode
In PR #5617,add new option to have open loop for MPPI. Now it have 1 more option to use last command velocity for initial state estimation instead of odometry. Useful when using low accelerations or when wheel odometry’s latency (motor response is poor) causes issues in MPPI initial state estimation.
Default value:
open_loop: false
Partial paths from Planner Server
PR #5687 adds support for outputting partial paths when planning through poses with the Planner Server. This is an alternative behavior to the existing all-or-nothing approach, where either a complete path through all poses is returned, or no path at all if any pose cannot be reached due to obstacles. While partial path output will still remain disabled by default, it can be set using the new allow_partial_planning dynamic parameter.
When this feature is used, the result from compute_path_through_poses action server will now indicate the last reached pose from the goals list in last_reached_index field.
Namespace added for primary controller parameters in Rotation Shim Controller
In PR #5654, a namespace was introduced for the primary controller parameters within the Rotation Shim Controller. This change ensures proper handling of dynamic parameter updates by grouping the primary controller’s parameters under its own namespace.
Before
plugin: "nav2_rotation_shim_controller::RotationShimController"
primary_controller: "nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController"
desired_linear_vel: 1.0
lookahead_dist: 0.6
After
plugin: "nav2_rotation_shim_controller::RotationShimController"
primary_controller:
plugin: "nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController"
desired_linear_vel: 1.0
lookahead_dist: 0.6
New CostmapSource observation type for Collision Monitor and CollisionDetector
In PR #5642, a new
CostmapSource observation type was added to both Collision Monitor and
Collision Detector, allowing them to subscribe directly to
nav2_msgs/msg/Costmap messages as an observation source. This source should be used with caution.
Options to build with isolated tests
In PR #5516, we added an option to build with isolated tests.
This allows users of rmw_zenoh_cpp to run the tests without needing to start a Zenoh router in a separate terminal.
You can enable this by building with --cmake-args -DUSE_ISOLATED_TESTS=ON.
RoundRobin wrap_around Parameter
PR #5308 adds a new wrap_around parameter to the RoundRobin behavior tree control node.
This parameter controls whether the RoundRobin node wraps around to its first child after the last one fails:
wrap_around=false(default): Node returns FAILURE instead of wrapping to first childwrap_around=true: Node wraps around to the first child and continues round-robin behavior
Breaking Change: The default behavior has changed. Previously, RoundRobin would always wrap around. Now it defaults to wrap_around=false, which means existing behavior trees will use the new non-wrap-around behavior unless explicitly configured.
This change addresses issues where RoundRobin index can become misaligned with RecoveryNode retry counter when used in recovery sequences, ensuring each recovery action is performed once and only once.
<!-- New default behavior (no wrap-around) -->
<RoundRobin wrap_around="false">
<Action_A/>
<Action_B/>
<Action_C/>
</RoundRobin>
<!-- Previous behavior (wrap-around) -->
<RoundRobin wrap_around="true">
<Action_A/>
<Action_B/>
<Action_C/>
</RoundRobin>
For additional details regarding the RoundRobin please see the RoundRobin configuration guide.
Configurable Inscribed Obstacle Cost Value for Costmap Conversion
In PR #5781, a new parameter inscribed_obstacle_cost_value is added to fix the issue where Costmap2DPublisher maps INSCRIBED_INFLATED_OBSTACLE (253) to value 99 in OccupancyGrid, but StaticLayer incorrectly converts it back to 251 instead of 253.
Default value:
inscribed_obstacle_cost_value: 99
Updated Nav2 RViz Panel
In PR #5774, the Nav2 panel (nav2_rviz_plugins) has been redesigned to provide comprehensive control over navigation requests and unify goal management tools.
Key Improvements:
Dynamic Behavior Tree (BT) Selection: Added a selector to specify a custom Behavior Tree XML file. This enables modifying navigation logic at runtime (e.g., specific recovery behaviors) for both
NavigateToPoseandNavigateThroughPosesrequests.Manual Coordinate Entry: Enables precise input of coordinates (X, Y, Theta) and frame_id via numeric fields, complementing the visual tool.
The UI workflow is now organized into two primary navigation modes:
Single-Goal Navigation (
NavigateToPose) Designed for individual targets. The goal can be defined using the standard “Nav2 Goal” tool (clicking on the map) or by manually entering precise coordinates directly in the panel.Multiple-Goal Navigation (
NavigateThroughPoses,Waypoint Following) Designed for executing sequences of poses. This mode utilizes a pose accumulation mode to build and manage a list of goals before execution:
List Building: Poses can be added via a hybrid approach: using the “Nav2 Goal” tool, manually entering coordinates, or loading a YAML file.
Editing: The list is fully interactive; users can modify specific pose parameters or remove individual goals from the sequence.
Execution: Once the list is defined, navigation can be executed via
NavigateThroughPosesorWaypoint Followingactions.
GIF above shows how multiple-goal navigation is configured mixing visual goal setting and file loading for NavigateThroughPoses and Waypoint Following actions.
Add Dynamic Window Pure Pursuit Option to Regulated Pure Pursuit Controller
In PR #5783, an option was added to enable the Dynamic Window Pure Pursuit (DWPP) algorithm in the Regulated Pure Pursuit controller. When this option is enabled, velocity and acceleration constraints are explicitly considered when computing command velocities. See the Configuration Guide for the new parameters associated with this feature.
Fumiya Ohnishi and Masaki Takahashi, DWPP: Dynamic Window Pure Pursuit Considering Velocity and Acceleration Constraints. arXiv:2601.15006., 2026.
The following parameters are updated for this feature.
- max_linear_vel (renamed)
Type
Default
double
0.5
- Description
The maximum linear velocity (m/s) to use. Previously named `desired_linear_vel`
Note: The velocity smoother clips velocity commands produced by this controller according to its own velocity and acceleration limits before publishing cmd_vel. Therefore, the velocity smoother parameters max_velocity, min_velocity, max_accel, and max_decel must be set to values consistent with, or greater than, the corresponding velocity, acceleration, and deceleration parameters of this controller.
Bond Heartbeat Period Default Value Change
In L-turtle, the default value for bond_heartbeat_period parameter has been increased from 0.1 to 0.25 seconds across all Nav2 lifecycle nodes, including the lifecycle manager. This change was implemented to reduce computational overhead and save CPU resources in systems with many nodes.
Migration note: If you have explicitly set bond_heartbeat_period to 0.1 in your configurations, you may want to remove this explicit setting to use the new default, or explicitly set it to 0.25 if you want to be explicit about the value. This value should now also be set in the lifecycle manager node as well.
Performance Impact
The following table shows the performance impact of changing the bond heartbeat period from 0.1s to 0.25s:
Bond Period (s) |
Composed CPU |
Single-Proc. CPU |
|---|---|---|
0.1 |
140% |
13% |
0.2 |
110% |
10% |
0.25 |
100% |
9% |
0.5 |
85% |
8% |
1.0 |
80% |
8% |
Note: This table should be populated with data from issue #5784 comment. Composed CPU is for all Nav2 processes combined.
Centralize Path Handler logic in Controller Server
PR #5446 centralizes path handling logic inside the controller server. Previously, each controller plugin implemented its own version of this logic.
With this change, users can now configure a path handler in the controller server:
PathHandler:
plugin: "nav2_controller::FeasiblePathHandler"
prune_distance: 2.0
enforce_path_inversion: True
enforce_path_rotation: False
inversion_xy_tolerance: 0.2
inversion_yaw_tolerance: 0.4
minimum_rotation_angle: 0.785
reject_unit_path: False
For more details, refer to the Path Handler section in the Controller Server documentation.
This update resolves the issue where Navigate Through Poses could terminate prematurely when passing near intermediate goal poses. We also introduce the following API changes as part of this fix.
GoalChecker
Previously:
virtual bool isGoalReached(
const geometry_msgs::msg::Pose & query_pose,
const geometry_msgs::msg::Pose & goal_pose,
const geometry_msgs::msg::Twist & velocity) = 0;
Now:
virtual bool isGoalReached(
const geometry_msgs::msg::Pose & query_pose,
const geometry_msgs::msg::Pose & goal_pose,
const geometry_msgs::msg::Twist & velocity,
const nav_msgs::msg::Path & transformed_global_plan) = 0;
A new argument is added: the transformed and pruned global plan from the path handler.
Controller Plugins
Previously:
virtual void setPlan(const nav_msgs::msg::Path & path) = 0;
Now:
virtual void newPathReceived(const nav_msgs::msg::Path & raw_global_path) = 0;
This callback should now only perform lightweight tasks (e.g. resetting internal state). The controller will be provided the processed plan during computeVelocityCommands().
Previously:
virtual geometry_msgs::msg::TwistStamped computeVelocityCommands(
const geometry_msgs::msg::PoseStamped & pose,
const geometry_msgs::msg::Twist & velocity,
nav2_core::GoalChecker * goal_checker) = 0;
Now:
virtual geometry_msgs::msg::TwistStamped computeVelocityCommands(
const geometry_msgs::msg::PoseStamped & pose,
const geometry_msgs::msg::Twist & velocity,
nav2_core::GoalChecker * goal_checker,
const nav_msgs::msg::Path & transformed_global_plan,
const geometry_msgs::msg::PoseStamped & global_goal) = 0;
Two new arguments are provided:
the transformed and pruned global plan from the path handler.
The last pose from the global plan.
Moreover, several parameters have also been added to / removed from individual controller plugin configurations as part of centralizing path-handling logic in the controller server.
DWB
Removed parameters
prune_planshorten_transformed_planprune_distanceforward_prune_distancetransform_tolerancepublish_global_planpublish_transformed_plan
Added parameters
path_length_tolerance
MPPI
Removed parameters
transform_toleranceprune_distancemax_robot_pose_search_distenforce_path_inversioninversion_xy_toleranceinversion_yaw_tolerance
New AxisGoalChecker Plugin
A new goal checker plugin, AxisGoalChecker, has been added to provide path-direction-aware goal checking. Unlike distance-based goal checkers, AxisGoalChecker projects the robot’s position onto the path direction defined by the last segment of the path, allowing independent tolerances along the path (along_path_tolerance) and perpendicular to it (cross_track_tolerance).
Key parameters:
along_path_tolerance: Tolerance along the path direction (default: 0.25m)cross_track_tolerance: Tolerance perpendicular to the path (default: 0.25m)path_length_tolerance: Maximum remaining path length to consider for goal checking (default: 1.0m)is_overshoot_valid: When true, allows the robot to overshoot past the goal by any distance along the path while still being within tolerance (default: false)
This goal checker is particularly useful for applications requiring precise alignment along specific axes, such as docking operations or warehouse navigation where lateral precision differs from forward/backward precision.
See AxisGoalChecker for full configuration details.
Add support for switching between SMAC planners
Prior to PR 5840, switching between SMAC planners at runtime was not supported due to static variables in the SMAC planner implementations causing conflicts when multiple instances were created. The PR addressed this issue by refactoring the SMAC planner code to eliminate the use of static variables, allowing multiple instances of different SMAC planners to coexist without conflicts.
OMNI Analytic Expansion Support in SmacPlannerLattice
PR #5965 adds omnidirectional (OMNI) analytic expansion support to SmacPlannerLattice.
When a lattice primitives file specifies motion_model: "omni" in its metadata, the planner now automatically:
Uses
SE2StateSpace(straight-line with linear heading interpolation) instead of Dubins/Reeds-Shepp for analytic expansion and distance heuristicsSkips turning-radius refinement in analytic path expansion (SE2 paths are radius-independent)
Configures the path smoother in holonomic mode
Disables
allow_reverse_expansionwith a warning (meaningless for omnidirectional robots)
No parameter changes are required — the OMNI motion model is auto-detected from the lattice file metadata.
Before:

After:
New IsWithinPathTrackingBounds Node
In PR 5983, a new behavior tree node, IsWithinPathTrackingBounds, was added to check if the robot is within specified bounds of the path for tracking purposes. See the demo for an example of how to use this node in a behavior tree.
RPP: min_distance_to_obstacle fix and new allow_obstacle_checking_beyond_goal parameter
PR #5677 resolves an issue where min_distance_to_obstacle was not properly enforced when use_velocity_scaled_lookahead_dist was enabled. Previously, collision checking was limited to the carrot distance, which at low speeds could be shorter than min_distance_to_obstacle. For example, with min_lookahead_dist: 0.3, min_distance_to_obstacle: 0.9, and max_lookahead_dist: 1.5, if the robot had not accelerated enough for the lookahead to reach 0.9m, obstacle checking would only cover up to the carrot position rather than the configured 0.9m. The collision checker now correctly extends the simulation distance to min_distance_to_obstacle (capped by max_lookahead_dist) regardless of the current carrot distance.
Additionally, warnings have been added to the parameter handler to alert users of configurations where min_distance_to_obstacle cannot be fully enforced:
When using
use_velocity_scaled_lookahead_dist, a warning is emitted ifmin_distance_to_obstacleexceedsmax_lookahead_dist.When using a constant
lookahead_dist, a warning is emitted ifmin_distance_to_obstacleexceedslookahead_dist.
A new parameter allow_obstacle_checking_beyond_goal (default: false) has also been added. By default, obstacle checking along the projected trajectory stops at the goal position (end of the path). When enabled, collision checking continues past the goal up to min_distance_to_obstacle, regardless of the remaining path length. This parameter requires use_velocity_scaled_lookahead_dist to be enabled and min_distance_to_obstacle > 0.0.
Refactored Inflation layer powered by OpenMP
PR #5933 refactors the Inflation layer to leverage OpenMP for parallel processing, significantly improving performance in large maps.
The new implementation replaces the previous queue-based cell iteration with a Felzenszwalb-Huttenlocher distance transform algorithm. When OpenMP is not available at compile time, the layer falls back to single-threaded operation.
Move isStopped, isPathValid, and isPoseOccupied from condition nodes to action nodes
In PR 5991, the following nodes were moved from condition nodes to action nodes and renamed:
IsStopped is now CheckStopStatus
IsPathValid is now ValidatePath
IsPoseOccupied is now CheckPoseOccupancy
This change was made because these behavior tree nodes may return RUNNING or require more time to complete, making them unsuitable for behavior tree that are expected to be ticked at 100 Hz.
Collision Monitor debounce parameters
PR #6006 adds temporal debounce controls for polygon trigger behavior in Collision Monitor and Collision Detector:
<polygon_name>.trigger_consecutive_points<polygon_name>.release_consecutive_points
A value of 1/1 preserves single-cycle trigger/release behavior.
In practice, values greater than 1 can reduce sensor noise flicker while remaining responsive.
See:
MPPI per-critic trajectory cost visualization
PR #6036 enhances MPPI trajectory visualization with per-critic cost coloring.
When visualize is enabled, candidate trajectories are now rendered as cost-colored lines using a green-to-yellow-to-red gradient, with collision trajectories shown in magenta.
A new critic_index_to_visualize parameter (default 0) selects which critic’s costs to display: 0 shows the total cost across all critics, while 1..N selects an individual critic by index.
The publish_critics_stats parameter has been removed; critic statistics (~/critics_stats topic) are now published automatically when visualize is enabled.
Constrained Smoother cost function formulation corrected
PR #6000 changes the cost function formulation in nav2_constrained_smoother. Weights for the constrained smoother may need to be adjusted as a result.
Earlier, nav2_constrained_smoother was using a cost formulation of \(cost = w_1^2 * cost_1^4 + w_2^2 * cost_2^4 + ...\) because the internal squaring of residuals performed by Ceres Solver was not accounted for. This caused the optimizer to frequently fail to converge.
The internal squaring of Ceres is now considered and the cost formulation is corrected to \(cost = w_1 * cost_1^2 + w_2 * cost_2^2 + ...\). This makes the constrained smoother approximately 10x faster in testing and results in converged solutions and improved path quality. A detailed analysis of improvement is available in: Issue #5072
Values for the weights will need to be retuned for all users, unfortunately, but will get faster and more reliable results!
ValidatePath / IsPathValid parameter changes
PR #6027 renames the check_full_path parameter to stop_at_first_collision in both the ValidatePath BT node and the IsPathValid service definition. The boolean semantics are inverted: check_full_path=false (old default) is equivalent to stop_at_first_collision=true (new default).
Additionally, a new max_lookahead_distance parameter (default -1.0) has been added to both the BT node and the service. When set to a positive value, only the portion of the path within that distance ahead of the robot is validated, improving efficiency when full path validation is not necessary.
Global planner plugin natively accepts viapoints
PR #5995 updates the createPath API for the BaseGlobalPlanner to include a vector std::vector<geometry_msgs::msg::PoseStamped> argument that takes in a list of intermediate points and passes them to the planner plugin implementation.
The function signature for createPath must be updated accordingly for all custom planner plugins inheriting from the BaseGlobalPlanner. This change does not alter the behavior of ComputePathThroughPoses that connects consecutive segments end-to-end but does upgrade the ComputePathToPose action.
MPPI motion models use plugin-based configuration
PR #6076 adds support for plugin-based configuration of motion models in MPPI.
Motion model now has to be set up by specifying plugin to use:
MPPIController:
plugin: "nav2_mppi_controller::MPPIController"
motion_model: "diff_drive"
diff_drive:
plugin: "mppi::DiffDriveMotionModel"
- Supported motion model plugins are:
mppi::DiffDriveMotionModel: replacesmotion_model: DiffDrivemppi::OmniMotionModel: replacesmotion_model: Omnimppi::AckermannMotionModel: replacesmotion_model: Ackermann
While “diff_drive” is the default value for motion_model parameter, it is still required to specify the plugin for it, as shown above.
Adaptive tolerance goal checker
PR #6052 adds a new adaptive tolerance goal checker.
The adaptive tolerance goal checker uses two underlying goal tolerances a fine and a coarse one. The fine tolerance is used to instantly trigger goal reached when the robot is close to the goal (functionally same as simple goal checker), while the coarse tolerance is used to trigger goal reached when the robot is further from the goal but is making no meaningful progress towards it (or not expected to).
- The goal is cosidered reached when one of the following conditions is met:
The robot is within the fine goal tolerance
The robot is within the coarse goal tolerance and its linear velocity and orientational velocity are below a specified threshold for a set amount of cycles
The robot is within the coarse goal tolerance and robots distance to the goal is not improving for a set amount of cycles
The robot is within the coarse goal tolerance and it has passed the finish line (the line perpendicular to the first robot pose within the coarse tolerance and passing through the goal pose)
See AdaptiveToleranceGoalChecker for full details.
Stateful parameter removed from Regulated Pure Pursuit Controller
PR #6071 removes the stateful parameter from the Regulated Pure Pursuit Controller. That parameter previously enabled stateful goal handling, allowing the controller to keep the goal active and continue aligning heading once the XY tolerance was reached, rather than reverting to XY position corrections.
A new isGoalXYReached API has been added to the GoalChecker, which checks if the XY position has been reached but not the yaw. It takes the stateful parameter into consideration if set to true in the goal checker configuration. This removes the need for a separate controller plugin parameter, and the behavior now applies consistently across the Graceful controller, the Rotation Shim controller, and the Regulated Pure Pursuit controller.
Clearing Individual Costmap Plugins
PR #6140 extends the below costmap clearing services to allow optionally clearing a subset of selected costmap plugins.
ClearEntireCostmap
ClearCostmapAroundRobot
ClearCostmapAroundPose
ClearCostmapExceptRegion
An new field plugins has been added to these service requests, which takes a list of plugin names to clear.
If this field is empty, all plugins will be cleared as before. If specific plugin names are provided, only those plugins will be cleared while the others remain unchanged.
This is useful for selectively clearing specific layers (e.g. completely clearing only the obstacle layer while keeping the static layer intact).
Any plugin name that is specified in the service request must satisfy the following conditions. If either of these conditions is not met, no clearing operation is performed and the service returns a failure response.
The plugin name must correspond to a plugin that is currently loaded in the costmap.
The requested plugin must be
clearable. For example, a plugin of typeObstacleLayeris clearable while that of typeStaticLayeris not.
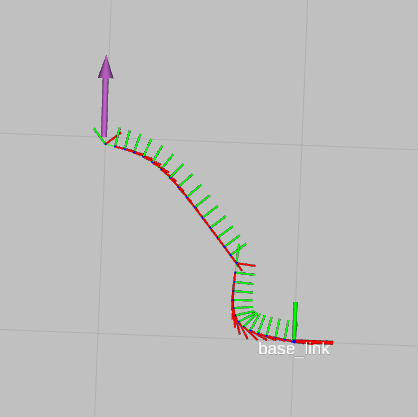
MPPI Controller: Per-Axis Delay Compensation with command history replay
PR #6154 adds a feature to compensate per-axis actuator and transport delay. Without it the planner assumes commands take effect instantly. On platforms with hydraulic steering or any other source of lag, this mismatch causes oscillations while tracking the path. The feature works best in combination with setting open_loop: true.
Three new MPPIController parameters, default 0.0 (feature disabled):
model_delay_vx— linear-x command delaymodel_delay_vy— linear-y command delay (holonomic platforms only)model_delay_wz— angular-z command delay
When non-zero, the optimizer fills the first round(delay / model_dt) rollout steps per axis from a ring buffer of recently published commands (the ones still in flight) and shifts the planned control sequence forward by the same number of steps. The first new command lands at the rollout position, where it will actually execute.
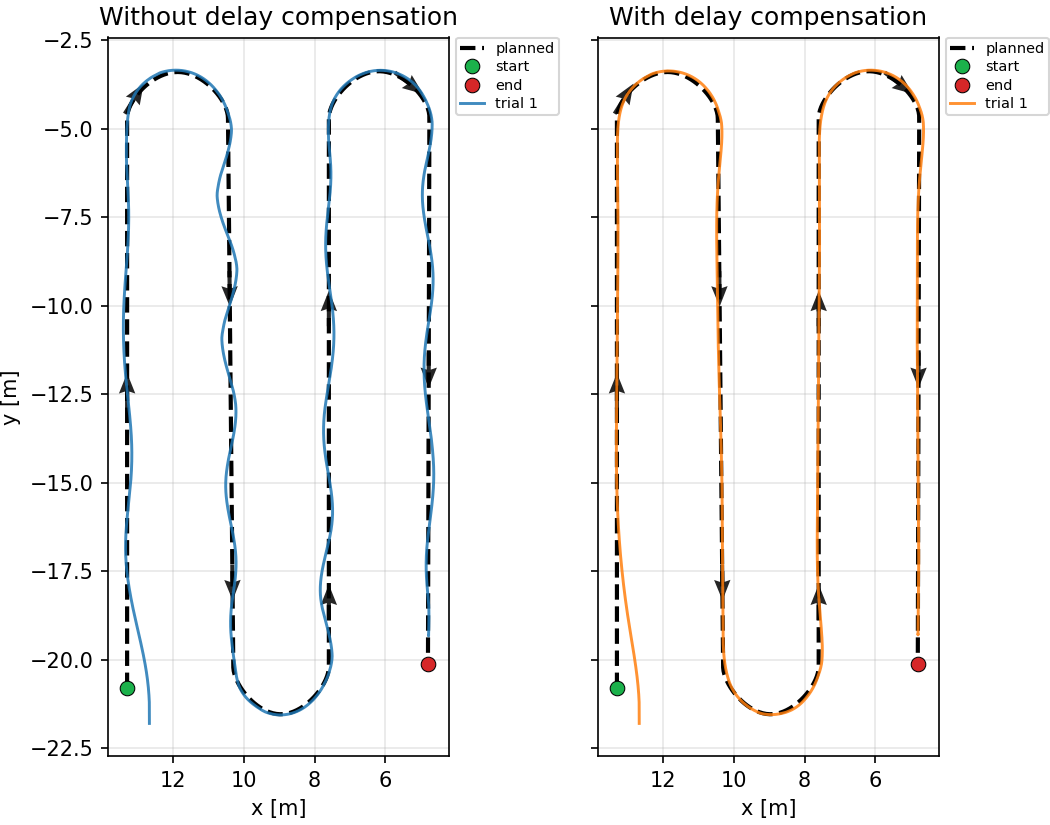
The plot shows the path of a vehicle with 600 ms steering delay. Without delay compensation (left), the controller oscillates around the planned path. With active delay compensation model_delay_wz=0.6 (right), tracking is visibly better.
SpeedFilter path lookahead
PR #6150 adds an optional path-lookahead mode to the SpeedFilter plugin, enabled via the enable_path_lookahead parameter (default disabled). When enabled, the filter looks ahead along the planned path and applies the strictest speed limit found within a velocity-dependent window, allowing the robot to decelerate before entering a speed-restricted zone. The default behavior of speed limits being applied only at the robot’s current pose is unchanged when the parameter enable_path_lookahead is left disabled. See the Speed Filter Parameters configuration page for the new parameters that control the lookahead behavior.
TruncatePathLocal BT Node: robot_frame renamed to robot_base_frame
PR #6242 renames the robot_frame input port to robot_base_frame to align with Nav2 naming conventions. The node now uses deconflictPortAndParamFrame() to respect the robot_base_frame parameter from the BT Navigator config when the port is omitted, matching the behavior of other BT nodes like GetCurrentPose and GoalReached.
Behavior trees using TruncatePathLocal with the old port name will need to update:
<!-- Before -->
<TruncatePathLocal robot_frame="base_link" ... />
<!-- After -->
<TruncatePathLocal robot_base_frame="base_link" ... />