Vector Object Server
The Vector Object Server implements a server that puts vector objects (such as polygons and circles) on OccupancyGrid raster map. The output raster map is being published by Vector Object server, and it could be used anywhere in the Nav2 stack or outside it.
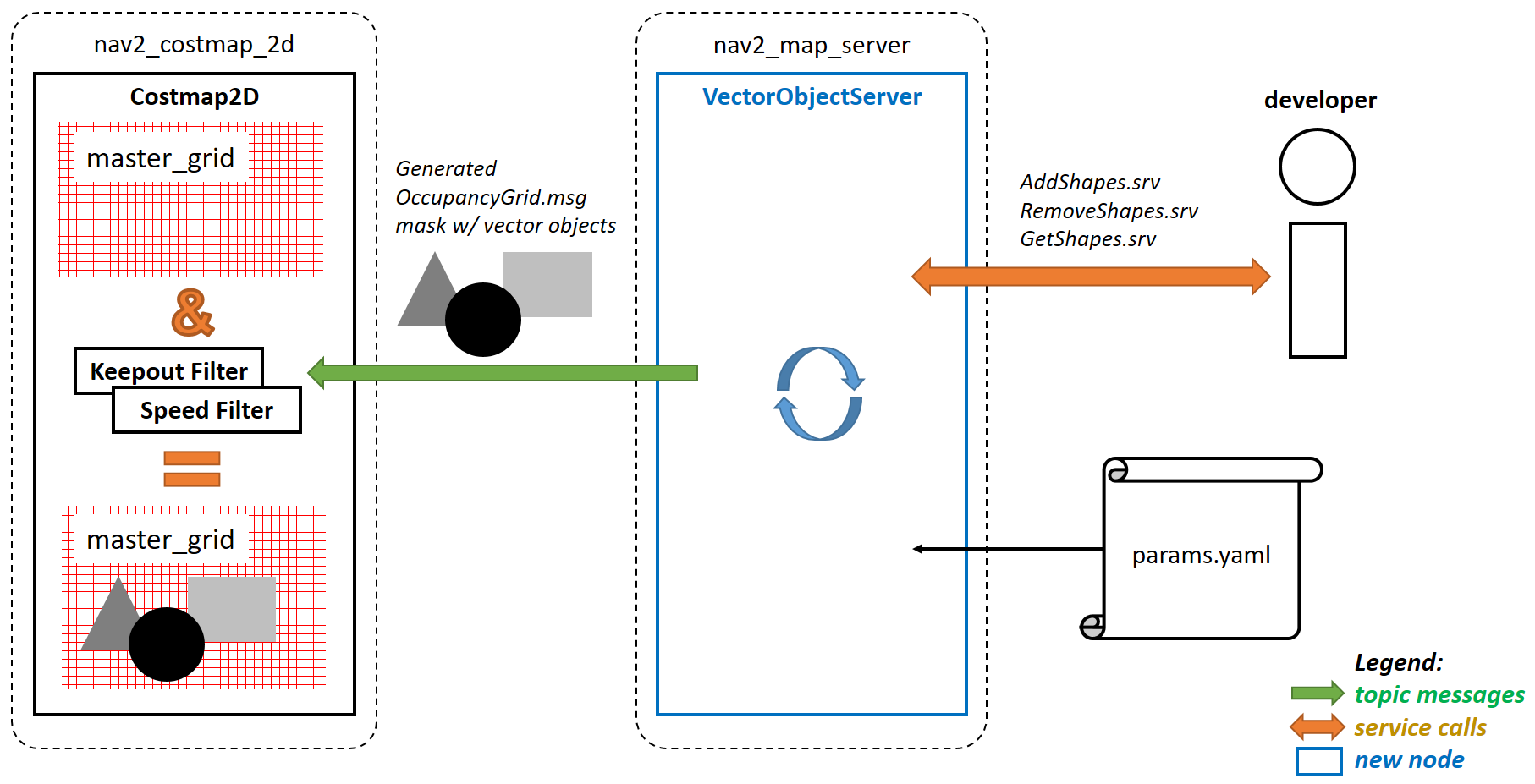
The main application of Vector Object server is to output raster maps of polygon objects or regions with existing costmaps of environment, targeting for robot navigation purposes (for example for dynamic obstacles simulation/highlighting, sensors noise removal, black-out areas on maps, synthetic testing purposes, and much more). Rather than rastering vector objects each iteration or at run-time, it is done one-time on startup, and served to costmap layers or other consumers improving performance. A typical setup model for this is a Nav2 stack with Costmap Filters enabled, running in conjunction with a Vector Object server, which produces vectorised OccupancyGrid maps as input masks for the Costmap Filters:
These vector shapes could be added by using ROS input parameters as well as being handled by the following service calls: AddShapes.srv which adds new shapes or modifies existing ones, RemoveShapes.srv which removes any or all shapes from the map GetShapes.srv which returns all shapes on the map.
Each vector shape is being handled by its unique_identifier_msgs/UUID. Developers can choose whether to specify it manually for a new shape, or have it generated automatically by the Vector Object server. The UUID can always be obtained by making a GetShapes.srv request and getting the response with all shapes’ UUIDs and their properties.
The Vector Object server places shapes on the map. Each vector object has its own value in the range from {-1}, [0..100], which matches the OccupancyGrid values. Vector objects can be overlapped with each other by using one of the global overlapping rules: (a) sequential overlapping in the same order as vector objects arrived on the server, or (b) taking the maximum / minimum value from all vector objects and the map background (if it is known).
This page describes all the configuration parameters of the Vector Object server. For more information on how to navigate with your own Vector Object server, please refer to the Navigating with Vector Objects tutorial.
Features
The following vector shapes are currently supported for placing on a map:
Polygons
Circles
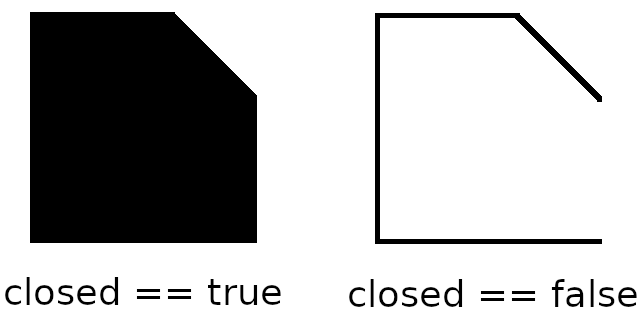
Polygons can be filled with any value or drawn as a polygonal chain, if it is not supposed to be a closed shape:
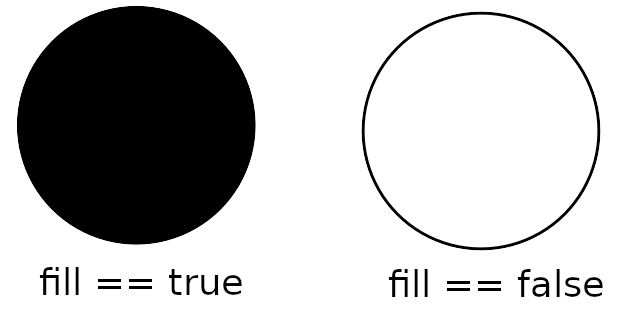
Circles can be filled with any value or drawn without any fill (only the circle boundary is placed on the map):
Vector shapes could be set once during the Vector Object server startup as ROS-parameters, and added/modified/removed over the time using the following service calls:
AddShapes.srv: adds new shapes or modifies existing onesRemoveShapes.srv: removes any or all shapes from the mapGetShapes.srv: gets all shapes and their properties
Vector shapes are being identified by their UUID (
unique_identifier_msgs/UUID), which is generated automatically for a new shape, or could be given manually by the developer.Vector shapes can be placed in any frame:
If at least one of the shapes is set in a different frame than the map, a dynamic update model will be enabled: this shape can move over the time, output map will be published dynamically with a given rate.
If all shapes are set in the same frame as map, map will be published/updated once: at startup of Vector Object server and on each call of
AddShapes.srvorRemoveShapes.srvto change the shape.
Covered use-cases
Using Vector Object server publishing an output map as input mask to Costmap Filters allows the following example use-cases using polygon, vector representations of areas rather than rastered masks:
No-access zone
Speed-restriction areas
Virtual obstacles on costmap
Geofence / outer boundary and inner virtual obstacles
Robot footprint (or any other moving objects) replacement
Hiding some areas from costmap
Sensors noise removal
Dynamic objects simulation/highlighting
Other testing purposes
Parameters
- map_topic
Type
Default
string
“vo_map”
- Description:
Output topic, publishing an OccupancyGrid map with vector objects put on it.
- global_frame_id
Type
Default
string
“map”
- Description:
The name of the coordinate frame where the map is being published at.
- enforce_global_frame_id
Type
Default
bool
false
- Description:
Enforce the use of the global frame ID for all shapes. Any shape with a non-empty frame ID, different than the global frame ID, will lead to failure. This will also disable the creation of the TF listener.
- resolution
Type
Default
double
0.05
- Description:
Output map resolution in meters.
- default_value
Type
Default
int
-1 (unknown)
- Description:
Default OccupancyGrid value to fill the background of output map with.
- overlay_type
Type
Default
int
0
- Description:
How one vector object to be overlaid with other and the map. The following values are supported:
0 (
OVERLAY_SEQ): Vector objects are superimposed in the order in which they have arrived.1 (
OVERLAY_MAX): Maximum value from vector objects and map is being chosen.2 (
OVERLAY_MIN): Minimum value from vector objects and map is being chosen. Unknown OccupancyGrid value is always being overrode, when it is possible.
- update_frequency
Type
Default
double
1.0
- Description:
Output map update frequency (when dynamic update model is switched-on).
- transform_tolerance
Type
Default
double
0.1
- Description:
Transform tolerance for the case when any of the shapes are placed in different than map’s frame.
- shapes
Type
Default
vector<string>
{}
- Description:
List of vector objects (polygons and circles). Empty by-default.
Shapes parameters
<shape_name> - is the corresponding shape name string selected for this vector object.
<shape_name>.typeType
Default
string
N/A
- Description:
Type of vector object shape. Available values are
polygonandcircle. Causes an error, if not specialized.
<shape_name>.uuidType
Default
string
N/A
- Description:
UUID of the shape specified in
12345678-9abc-def0-1234-56789abcdef0format. Parameter is optional and could be skipped: if not specialized, Vector Object server will automatically generate a new one for the shape.
<shape_name>.frame_idType
Default
string
“”
- Description:
Frame ID of the given shape. Empty value is being treated as map’s global frame.
<shape_name>.valueType
Default
int
100 (occupied)
- Description:
Shape’s value to be put on map with.
Parameters applicable for polygons only
<shape_name>.pointsType
Default
vector<double>
N/A
- Description:
Polygon vertices, listed in
[p1.x, p1.y, p2.x, p2.y, p3.x, p3.y, ...]format (e.g.[0.5, 0.5, 0.5, -0.5, -0.5, -0.5, -0.5, 0.5]for the square). Minimum 3 points for a triangle polygon. Causes an error, if not specialized incorrectly (less than 6 or odd number of items in the vector) or not specialized.
<shape_name>.closedType
Default
bool
true
- Description:
Whether the polygon is closed (and filled), or drawn as polygonal chain otherwise.
Parameters applicable for circles only
<shape_name>.centerType
Default
vector<double>
N/A
- Description:
Center of the circle, listed in
{center.x, center.y}format (e.g.{0.2, 0.3}). Should contain exactly 2 items: X and Y coordinate of the circle’s center in a given frame. Otherwise, causes an error.
<shape_name>.radiusType
Default
double
N/A
- Description:
Circle radius. Causes an error, if less than zero or not specialized.
<shape_name>.fillType
Default
bool
true
- Description:
Whether the circle to be filled with a given value, or drawn only circle’s border otherwise.
Example
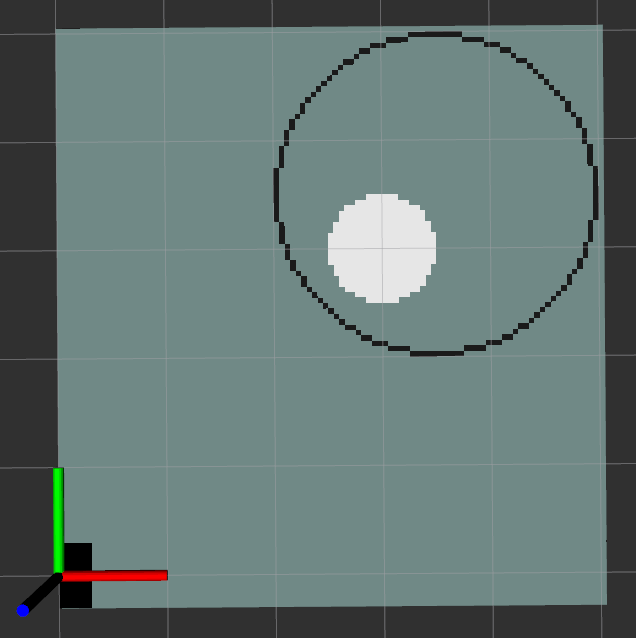
Here is an example of configuration YAML for the Vector Object server:
vector_object_server:
ros__parameters:
map_topic: "vo_map"
global_frame_id: "map"
enforce_global_frame_id: False
resolution: 0.05
default_value: -1
overlay_type: 0
update_frequency: 1.0
transform_tolerance: 0.1
shapes: ["Poly", "CircleA", "CircleB"]
Poly:
type: "polygon"
frame_id: "map"
closed: True
value: 100
points: [0.3, 0.3, 0.3, -0.3, 0.0, -0.3, 0.0, 0.3]
CircleA:
type: "circle"
frame_id: "map"
fill: True
value: 10
center: [3.0, 3.0]
radius: 0.5
uuid: "7b3f3d7d-135c-4b6c-aca1-7a84d1050505"
CircleB:
type: "circle"
frame_id: "map"
fill: False
value: 90
center: [3.5, 3.5]
radius: 1.5
For this, Vector Object server will produce the following map: