Navigate To Pose and Pause Near Goal-Obstacle
Note
As a prerequisite, we encourage the users to go through the Behavior Tree documentation, which explains about different behaviors nodes used in these trees such as ReactiveSequence, SequenceWithMemory and RetryUntilSuccessful.
This behavior tree is a soft extension to the Navigate To Pose. Apart from the functionalities of Navigate To Pose, this behavior tree allows the robot to efficiently handle an obstacle (e.g. forklift, person, or other temporary obstacles) close to the goal by pausing the robot’s navigation and wait for a user-specified time to check if the obstacle has cleared. If the obstacle has moved during the waiting time, the robot will continue to the goal taking the shorter path. If the obstacle has not moved during the waiting time or the waiting time expires, then the robot will use the longer path around to reach the final goal location. Ultimately, for a given task, this behavior tree aids in solving the problem of long cycle time, which is caused because of the long path generated due to the temporary obstacles present close to the goal location.
The behavior tree is depicted in the image below.
From the image, it can be noted that there is an additional branch in the Navigation Subtree known as MonitorAndFollowPath. This branch is created with the intention for the users to perform any kind of monitoring behavior that their robot should exhibit.
In this particular BT, the monitoring branch is exclusively utilized by PathLongerOnApproach BT node for checking if the global planner has decided to plan a significantly longer path for the robot on approaching the user-specified goal proximity.
If there is no significantly longer path, the monitor node goes into the FollowPath recovery node, which then generates the necessary control commands.
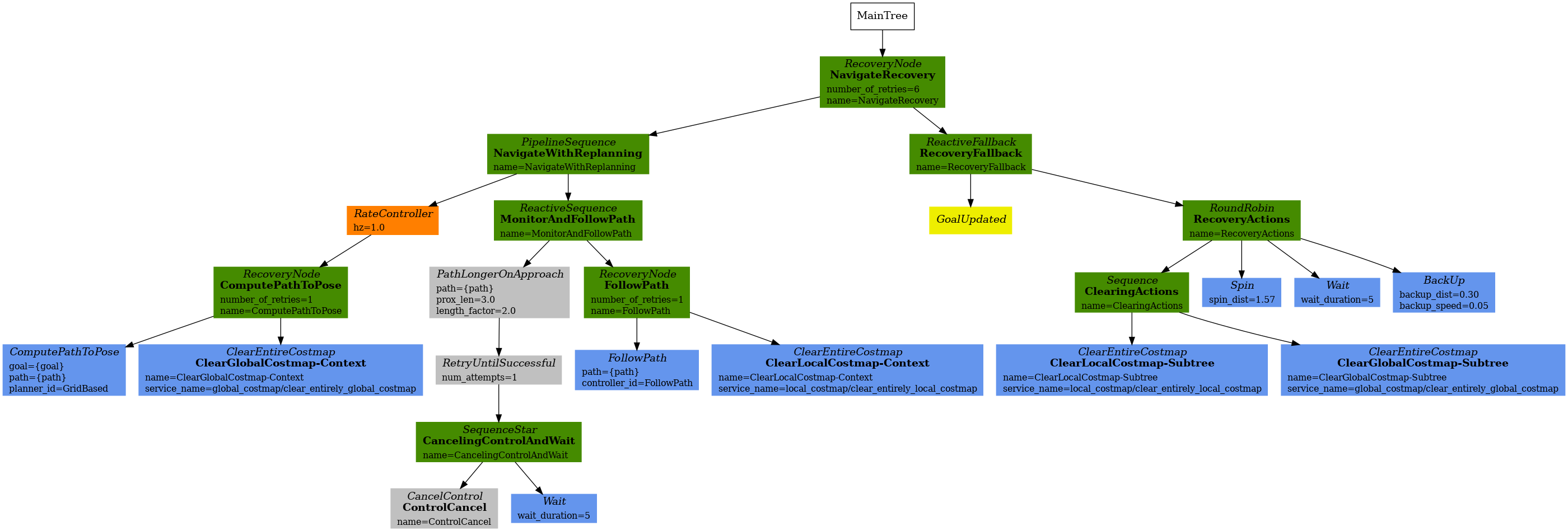
Once there is a significantly longer path, the child node for the PathLongerOnApproach node ticks.
The child node is a RetryUntilSuccessful decorator node, which inturns have a SequenceWithMemory node as its child.
Firstly, the SequenceWithMemory node cancels the controller server by ticking the CancelControl node. The cancellation of the controller server halts the further navigation of the robot.
Next, the SequenceWithMemory node ticks the Wait node, which enables the robot to wait for the given user-specified time.
Here we need to note that, the MonitorAndFollowPath is a ReactiveSequence node, therefore the PathLongerOnApproach node needs to return SUCCESS, before the FollowPath node can be ticked once again.
In the below GIF, it can be seen that the robot is approaching the goal location, but it found an obstacle in the goal proximity, because of which the global planner, plans a longer path around.
This is the point where the PathLongerOnApproach ticks and ticks its children, consequently cancelling the controller_server and waiting to see if the obstacle clears up.
In the below scenario, the obstacles do not clear, causing the robot to take the longer path.
Alternatively, if the obstacles are cleared, then there is a shorter path generated by the global planner.
Now, the PathLongerOnApproach returns SUCCESS, that cause the FollowPath to continue with the robot navigation.
Apart from the above scenarios, we also need to note that, the robot will take the longer path to the goal location if the obstacle does not clear up in the given user-specific wait time.
In conclusion, this particular BT would serve, both as an example and ready-to-use BT for an organizational specific application, that wishes to optimize its process cycle time.
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<PipelineSequence name="NavigateWithReplanning">
<ControllerSelector selected_controller="{selected_controller}" default_controller="FollowPath" topic_name="controller_selector"/>
<PlannerSelector selected_planner="{selected_planner}" default_planner="GridBased" topic_name="planner_selector"/>
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="{selected_planner}" error_code_id="{compute_path_error_code}" error_msg="{compute_path_error_msg}"/>
<ClearEntireCostmap name="ClearGlobalCostmap-Context" service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>
</RateController>
<ReactiveSequence name="MonitorAndFollowPath">
<PathLongerOnApproach path="{path}" prox_len="3.0" length_factor="2.0">
<RetryUntilSuccessful num_attempts="1">
<SequenceWithMemory name="CancelingControlAndWait">
<CancelControl name="ControlCancel"/>
<Wait wait_duration="5.0"/>
</SequenceWithMemory>
</RetryUntilSuccessful>
</PathLongerOnApproach>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="{selected_controller}" error_code_id="{follow_path_error_code}" error_msg="{follow_path_error_msg}"/>
<ClearEntireCostmap name="ClearLocalCostmap-Context" service_name="local_costmap/clear_entirely_local_costmap"/>
</RecoveryNode>
</ReactiveSequence>
</PipelineSequence>
<ReactiveFallback name="RecoveryFallback">
<GoalUpdated/>
<RoundRobin name="RecoveryActions">
<Sequence name="ClearingActions">
<ClearEntireCostmap name="ClearLocalCostmap-Subtree" service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap name="ClearGlobalCostmap-Subtree" service_name="global_costmap/clear_entirely_global_costmap"/>
</Sequence>
<Spin spin_dist="1.57" error_code_id="{spin_error_code}" error_msg="{spin_error_msg}"/>
<Wait wait_duration="5.0"/>
<BackUp backup_dist="0.30" backup_speed="0.05" error_code_id="{backup_error_code}" error_msg="{backup_error_msg}"/>
</RoundRobin>
</ReactiveFallback>
</RecoveryNode>
</BehaviorTree>
</root>
A complete demo of this BT can be seen in the video below: