Jazzy to Kilted
Moving from ROS 2 Jazzy to Kilted, a number of stability improvements were added that we will not specifically address here.
BehaviorTree error_msg
In PR #4459 adds error_msg to all action result messages
and PR #4460 captures and propagates error_msg result strings through the bt_navigator,
a new parameter for the BT Navigator error_code_name_prefixes was introduced, AND it is a mandatory replacement for error_code_names.
In other words the existence of the error_code_names parameter will be rejected as a runtime exception at startup and MUST be removed.
When configured correctly, and the behaviour tree xml configuration is modified appropriately, error codes and contextual error messages are propagated in the Result message of Nav2 action server requests.
This allows handling of specific errors with more contextual information, than simply the error code, to be viewed by application clients calling Nav2 or its servers.
Behavior tree based Navigator Action requests, require augmentation of behavior tree elements that support error_code_id and error_msg output ports.
The corresponding attribute values, must use port variable names that combine the relevant error_code_names_prefix with the suffix _error_code and _error_msg.
The following is an example of the error_code_names parameter that must be replaced
error_code_names:
- compute_path_error_code
- follow_path_error_code
with the error_code_names_prefixes parameter which specifies prefixes for the current set of built in action servers.
error_code_name_prefixes:
- assisted_teleop
- backup
- compute_path
- dock_robot
- drive_on_heading
- follow_path
- nav_thru_poses
- nav_to_pose
- spin
- route
- undock_robot
- wait
The following provides examples of modifications that should be made to behavior tree configurations to propagate the error messages and codes to the BT navigator result.
<ComputePathToPose goal="{goal}" path="{path}" planner_id="{selected_planner}" error_code_id="{compute_path_error_code}" error_msg="{compute_path_error_msg}"/>
<FollowPath path="{path}" controller_id="{selected_controller}" error_code_id="{follow_path_error_code}" error_msg="{follow_path_error_msg}"/>
<Spin spin_dist="1.57" error_code_id="{spin_error_code}" error_msg="{spin_error_msg}"/>
<Wait wait_duration="5.0" error_code_id="{wait_error_code}" error_msg="{wait_error_msg}"/>
<BackUp backup_dist="0.30" backup_speed="0.15" error_code_id="{backup_error_code}" error_msg="{backup_error_msg}"/>
<DriveOnHeading dist_to_travel="2.0" speed="0.2" time_allowance="12" error_code_id="{drive_on_heading_error_code}" error_msg="{drive_on_heading_error_msg}"/>
<UndockRobot dock_type="{dock_type}" error_code_id="{undock_robot_error_code}" error_msg="{undock_robot_error_msg}" />
<DockRobot dock_id="{dock_id}" error_code_id="{dock_robot_error_code}" error_msg="{dock_robot_error_msg}"/>
<NavigateToPose goal="{picking_location}" error_code_id="{nav_to_pose_error_code}" error_msg="{nav_to_pose_error_msg}"/>
The explicit specification of the error_code_names_prefix for both error_code_id and error_msg in the behavior tree xml is done to provide a configuration based level of indirection to enable resolution of namespace conflicts between built in Nav2 and third party actions servers.
If custom BTActionServer, BehaviorTreeNavigator, or associated BT nodes for task servers exist in your system, please review the PR to update the files to support the error code propagation.
TwistStamped Default CmdVel Change
In Kilted and newer, the default cmd_vel topic for all Twist publishers and subscriptions is changed to TwistStamped in order to enable a broader range of applications.
it also allows for rejection of stale velocity messages, which can be useful in some applications.
Your robot should now subscribe to a TwistStamped message instead of a Twist message & update your simulation appropriately.
The topic names are the same.
However, this can be disabled by setting enable_stamped_cmd_vel to false in the nav2_params.yaml file for all nodes that involve Twist subscriptions or publications.
See the configuration guide for more information on how to configure this parameter for each node.
An example simulation migration using Gazebo can be seen in the following pull request for the Turtlebot 3 and 4.
Docking with Static Infrastructure or Dynamic Docking
In PR #4627 a docking plugin type and logic was added to support non-charging dock types in the nav2 docking server.
This allows users to specify docking locations to static infrastructure, such as conveyers, or dynamic docking locations, such as a pallet.
It also includes a new docking plugin to demonstrate the new docking server capabilities simple_non_charging_dock.
New RViz panel for Docking
In PR #4458 a new RViz panel was added to interact with the Docking Server.
This panel allows the user to:
Dock the robot to a charger, selecting the dock id or the dock pose and type. It also allows the user to set whether or not to navigate to the staging pose.
Undock the robot from a charger.
The panel displays the action goal status and feedback published by nav2_msgs/DockRobot and nav2_msgs/UndockRobot actions. Users can find information such as elapsed time, number of retries and the current state of the action (staging, controlling, etc.), as well as the error codes of the action.
Here we can see the working demo of the plugin:
Attention
If the docking server is unavailable, then the combo box of the dock type will be empty.
BT Nodes Changes
Below is a list of new BT Nodes added:
GetPoseFromPath: An action to get a particular pose from an input path.RemoveInCollisionGoals: An action to remove waypoints that have a cost higher than a threshold.IsStopped: A condition to check if the robot is stopped for a certain duration.
Below is a list of changes to existing BT Nodes:
GoalUpdater: It now supports updating a list of goals as well (useful for NavigateThroughPoses interface)
New RViz Tool for Costmap Cost Cell Inspection
In PR #4546 a new RViz tool was added to get the costmap costcell’s cost and a service to get the costcell’s cost at the footprint pose.
Usage:
Click on any point in the costmap with costmap rviz tool to retrieve and display the cost value at that cell.
nav2_msgs/GetCostsservice can be used to retrieve the cost at footprint pose
Working demo of the tool:
Attention
If the costmap service is unavailable, then the tool will not be able to fetch and display the cost values.
Fix flickering visualization
In PR #4561 a map_vis_z parameter has been introduced to Costmap2DROS to help modify the map slightly below the default plane, aiming to eliminate rviz visualization flickering issues.
Default Value:
map_vis_z: 0.0
Minimum Value Without Flickering:
map_vis_z: -0.008
Before:
After:
Option to limit velocity through DWB trajectory
In PR #4663 a limit_vel_cmd_in_traj parameter was introduced to DWB local planner to allow the user to limit the velocity used in the trajectory generation based on the robot’s current velocity.
Default value:
false
Option to disable zero velocity publishing on goal exit
In PR #4675 a publish_zero_velocity parameter was introduced for the Controller server in order to disable zero velocity publishing on goal exit.
Default value:
true
Rotation Shim Disengagement Threshold
The parameter angular_disengage_threshold was introduced as a new threshold for disengagement of the rotation in the rotation shim controller.
Previous behavior rotated until the angular_dist_threshold, now it can rotate until the angular_disengage_threshold, which can be set closer to the path’s orientation if desired.
Added optional collision checking for the Docking Server
In PR #4752 an optional collision checking feature was added to the Docking server to check for collisions between the robot and the dock.
Default value:
true
Revamped multirobot bringup and config files to use namespaces
In PR #4715 multirobot bringup and the use of namespaces were overhauled to be compatible out of the box with ROS namespaces and remove custom logic, specifically:
The
use_namespaceparameter has been removed fromnav2_bringuplaunch files. Thenamespaceparameter will now always be used and default to/for “global namespace”.There is now a single rviz config file for both normal and namespaced robots. Topics have been changed to a relative path (i.e.
/map->map) and the rviznamespacewill be added automatically.There is now a single
nav2_params.yamlconfig file for both single and multirobot bringup. All the topics have been changed to relative (i.e./scan->scan).
Note that some plugins / nodes might have their own local namespace. This is the case for CostmapLayer which will be in a /ns/[layer_name] namespace. For these, a new function joinWithParentNamespace has been added to make sure joining relative paths results in /ns/topic_name rather than /ns/[layer_name]/topic_name.
If your use case doesn’t require multiple robots, keeping absolute paths in your nav2_params.yaml config file and rviz config file will preserve existing behavior.
For example, if you specify topic: scan in the voxel_layer of a local_costmap and you launch your bringup with a tb4 namespace:
User chosen namespace is
tb4.User chosen topic is
scan.Topic will be remapped to
/tb4/scanwithoutlocal_costmap.Use global topic
/scanif you do not wish the node namespace to apply
Removed global map_topic from Costmap node
In PR #4715 the global map_topic parameter has been removed from the Costmap2DROS node. This parameterwas only used in the StaticLayer and should be defined as a parameter local to the StaticLayer instead, for example:
global_costmap:
global_costmap:
ros__parameters:
[...]
# Not supported anymore
map_topic: my_map
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
# Do this instead
map_topic: my_map
Simplified Costmap2DROS constructors
The following constructors for Costmap2DROS have been removed:
explicit Costmap2DROS(
const std::string & name,
const std::string & parent_namespace,
const std::string & local_namespace,
const bool & use_sim_time);
explicit Costmap2DROS(const std::string & name, const bool & use_sim_time = false);
They have been consolidated into a single one:
explicit Costmap2DROS(
const std::string & name,
const std::string & parent_namespace = "/",
const bool & use_sim_time = false);
The local_namespace parameter has been removed and is now automatically set to the node’s name (which is what the second removed constructor did).
Parameters parent_namespace / use_sim_time both provide default values to maintain the ability of creating a Costmap2DROS object by just specifying a name.
Option to disable collision checking in DriveOnHeading, BackUp and Spin Actions
In PR #4785 a new boolean parameter named disable_collision_checks was added to the DriveOnHeading, BackUp and Spin actions to optionally disable collision checking. This can be useful, for example, in cases where you want to move the robot even in the presence of known obstacles.
Default value:
false
New Plugin Container Layer
In PR #4781 a costmap layer plugin type was added to support the grouping of different costmap layers under a single costmap layer. This would allow for different isolated combinations of costmap layers to be combined under one parent costmap instead of the current implementation which would indiscriminately combine all costmap layers together.
Iterative Target Selection for the Graceful Controller
In PR #4795 the nav2_graceful_controller was updated to iteratively select motion targets. This is a large refactor which significantly improves the performance of the controller. The motion_target_dist parameter has been replaced by min_lookahead and max_lookahead parameters. Additional changes include:
Improved defaults for
k_phi,k_delta,betaparameters of the underlying control law.Automatic creation of orientations for the plan if they are missing.
Addition of
v_angular_min_in_placeparameter to avoid the robot getting stuck while rotating due to mechanical limitations.final_rotationhas been renamedprefer_final_rotationand the behavior has changed slightly.
Conform to ROS 2 launch syntax in Turtlebot 3 multi-robot launch file
In PR #5000 the cloned_multi_tb3_simulation_launch.py launch file was updated so that parsing the robots conforms to the ROS 2 launch file standards. This change allows users to pass the robots from another launch file through launch_arguments which was not possible with the old version.
Example for including cloned_multi_tb3_simulation_launch.py in another launch file:
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory('nav2_bringup'), "launch", "cloned_multi_tb3_simulation_launch.py")
),
launch_arguments={"robots": "{name: 'robot1', pose: {x: 0.5, y: 0.5, yaw: 1.5707}}"}.items(),
)
MPPI controller re-implemented using Eigen library and performance improved by 40-45%
In the PR #4621 MPPI controller is fully reimplemented using Eigen as it is well supported hpc library and suits better for our use case of two dimensional batches of trajectories. GPU support for rolling out trajectories could also be possible in future using Eigen. MPPI Optimizer’s performance is improved by 40-50%. Now MPPI Controller can also be run on ARM processors which do not support SIMD Instructions extensively.
Enable goal orientation non-specificity
PR #4148 introduces two new parameters(goal_heading_mode, coarse_search_resolution) in the smac planner, specifically the smac planner hybrid and smac planner lattice that allows for the planner to plan to a goal with multiple orientations and return the best path in just one planning call. This is useful for robots that can approach a goal from multiple orientations and the user does not want to plan to each orientation separately. In addition to this, the coarse_search_resolution parameter is added to the smac planner lattice to allow for a faster search for the best path.
Here is an Example of the smacHybrid planner with the default goal_heading_mode to see the difference in the planned path.
Here is an Example of the smacHybrid planner with the bidirectional goal_heading_mode to see the difference in the planned path.
Here is an Example of the smacHybrid planner with the all_directions goal_heading_mode to see the difference in the planned path.
DriveOnHeading and BackUp behaviors: Addition of acceleration constraints
PR #4810 adds new parameters acceleration_limit, deceleration_limit, minimum_speed for the DriveOnHeading and BackUp Behaviors. The default values are as follows:
acceleration_limit: 2.5deceleration_limit: -2.5minimum_speed: 0.10
Rotation Shim Deceleration as a function of its target orientation
In PR #4864 the Rotation Shim Controller was updated to decelerate as a function of its target orientation. This allows the robot to slow down as it approaches its target orientation, reducing overshoot when passing to the primary controller. The deceleration is controlled by the max_angular_accel parameter.
A demo can be seen below with the following parameters:
[...]:
plugin: "nav2_rotation_shim_controller::RotationShimController"
angular_dist_threshold: 1.22 # (70 degrees)
angular_disengage_threshold: 0.05 # (3 degrees)
rotate_to_heading_angular_vel: 0.8
max_angular_accel: 0.5
Rotation Shim Open-loop Control
The parameter closed_loop was introduced to the Rotation Shim Controller to allow users to choose between open-loop and closed-loop control. If false, the rotationShimController will use the last commanded velocity as the next iteration’s current velocity. When acceleration limits are set appropriately and the robot’s controllers are responsive, this can be a good assumption. If true, it will use odometry to estimate the robot’s current speed. In this case it is important that the source is high-rate and low-latency to account for control delay.
Default value:
true
Near collision cost in MPPI cost critic
In PR #4996 a new parameter near_collision_cost was added to the MPPI cost critic to set a maximum proximity for avoidance. The critical cost will be applied to costs higher than this value even if non-collision inducing.
Default value:
253
Service introspection
In PR #4955 the parameter service_introspection_mode was introduced to the Nav2 stack to allow introspection of services. The options are “disabled”, “metadata”, “contents”.
Default value:
“disabled”
Rotation Shim Using Path Orientations
The parameter use_path_orientations was introduced to the Rotation Shim Controller to allow users to choose between using the orientations of the path points to compute the heading of the path instead of computing the heading from the path point’s relative locations. This is useful for planners that generate feasible paths with orientations for forward and reverse motion, such as the Smac Planner.
Default value:
false
MPPI - Publishing Optimal Trajectory
When publish_optimal_trajectory is enabled, the full optimal trajectory in the form of a nav2_msgs/Trajectory is published for debugging, visualization, and/or injection by other systems. This provides not just the pose information but velocities and timestamps of the MPC trajectory’s viapoints which can be useful for multi-stage control systems, jerk minimization, or collision avoidance systems.
Groot 2 Support
In PR #5065 , BT navigators: navigate_to_pose and navigate_through_poses now support live monitoring and visualization of the behavior tree using Groot 2. JSON conversions are also available to see the content of the Blackboard, allowing the introspection of the BT nodes. Switching bt-xmls on the fly through a new goal request is also included.
Because live monitoring of Behavior Tree with more than 20 nodes and visualizing the content of the blackboard is a PRO (paid) feature of Groot 2. This feature is disabled by default.
Note
Currently, there is a known bug that crashes Groot 2 when visualizing vectors and related types (e.g., Goals and Path) contained in the blackboard. Efforts are underway to resolve this issue. For updates, please refer to the following links: Groot2 issue #55 and BehaviorTree PR #958.
Docking backwards as plugin parameter
In PR #5079, the dock_backwards boolean parameter has been moved from the docking server to the dock plugin as the string parameter dock_direction. This allows the user to have multiple dock plugins with different directions in the same docking server. Default value is forward but may also be set as backward.
See Docking Server for more information.
New Position Goal Checker
In PR #5162, a new goal checker plugin called PositionGoalChecker has been added to Nav2. This plugin provides an alternative to the existing goal checkers by focusing only on the position component of the robot pose, ignoring orientation. This is used by the RPP controller to create stateful behavior to rotate to heading once meeting the goal tolerance.
Docking backwards without sensor
In PR #5153, the docking server was updated to allow docking backwards without a sensor for detection. It should be setup to approach the staging pose for the dock in the forward direction with sensor coverage for dock detection, then after detection it will rotate to back up into the dock using the initial detected pose only for deadreckoning.
A new parameter reverse_to_dock was added to the SimpleChargingDock and SimpleNonChargingDock plugins to allow this feature.
Default value:
false
See Docking Server for more information.
Here we can see the working demo of the feature:
RegulatedPurePursuit Controller [RPP]: new parameter stateful
PR #5167 adds a new parameter stateful for the regulated pure pursuit controllers. This parameter enables stateful goal handling behavior. When set to true, the controller will persist the goal state once the robot reaches the XY tolerance. It will then focus on aligning to the goal heading without reverting to XY position corrections.
Controller Server Frequency Removed Dynamic Parameter
PR #5106 removes control_frequency as a dynamic parameter.
This is done so that the plugins can identify which parameters belong to itself and not the larger servers to perform dynamic reconfigurations.
The controller server would update this value but the internal plugins would not properly so it was removed.
If you rely on this behavior, please file a ticket and discuss with maintainers how to re-add.
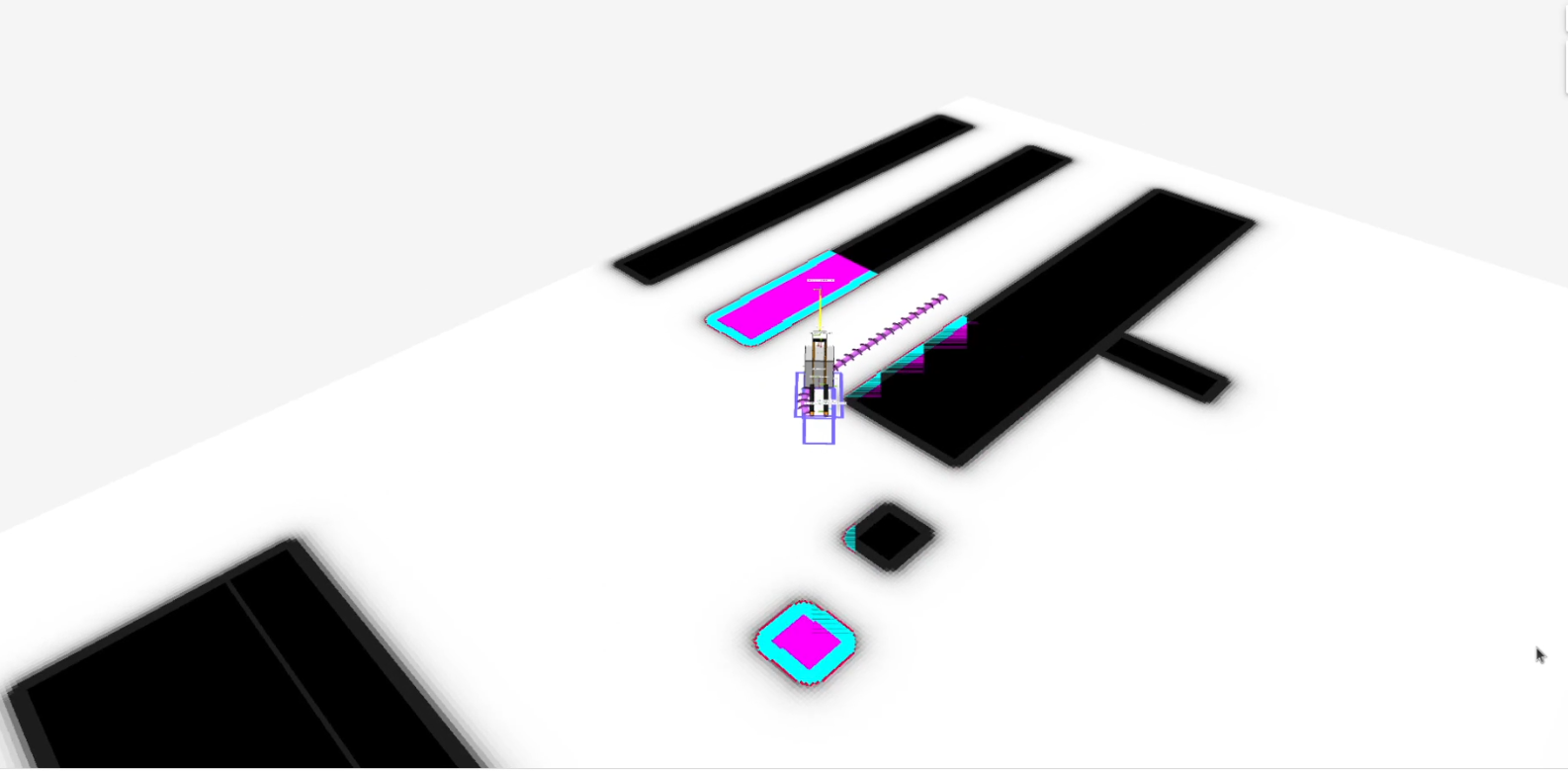
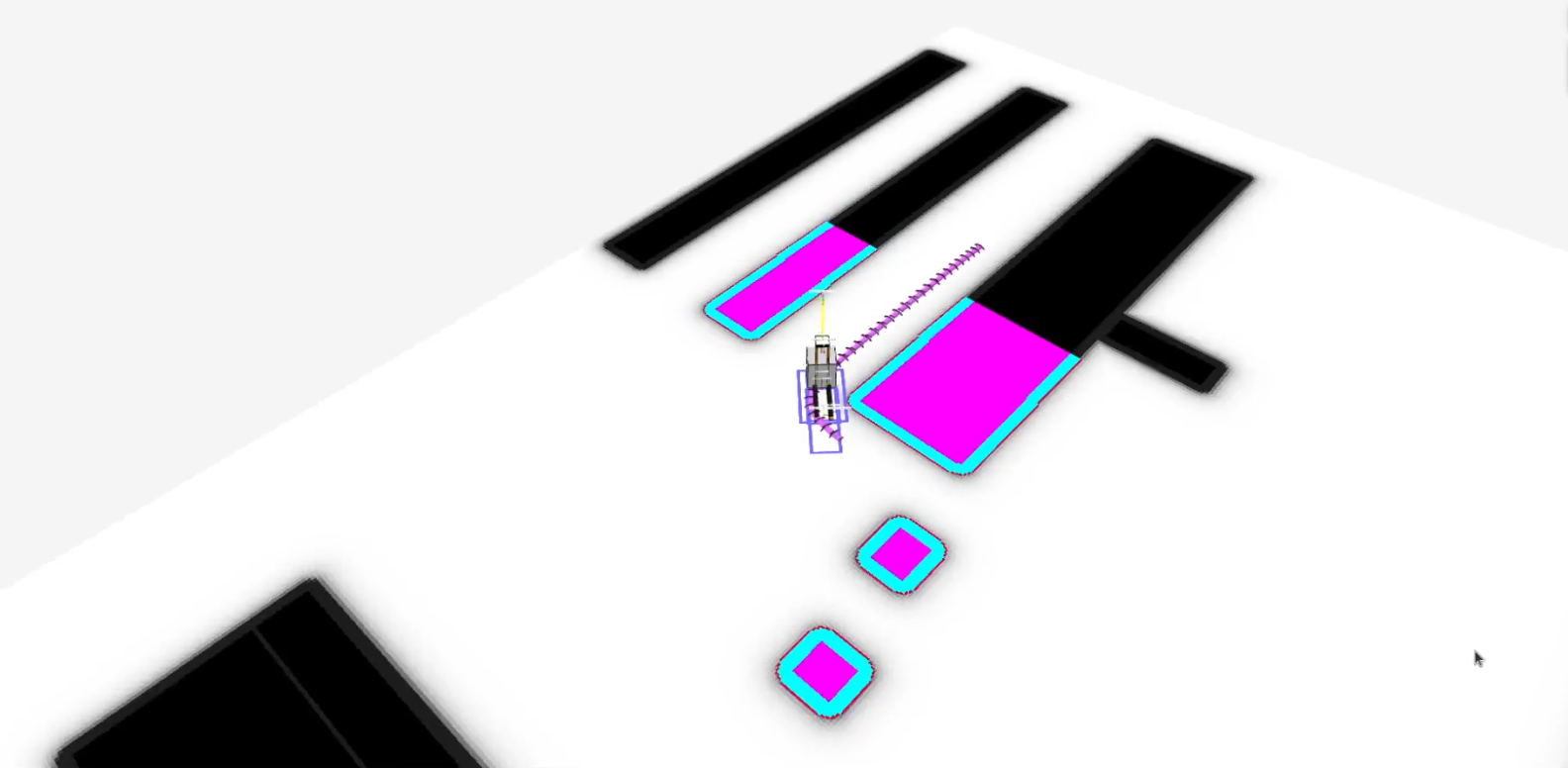
Default bringup supports keepout, speed zones, and route planning
In PR #5125, keepout zones were added to the depot and warehouse maps of the Turtlebot4 simulation in Gazebo.
For the depot map, the keepout zones were aimed at preventing the robot from entering under the shelves, blocking the entrance of the stairwell and entering the surrounding area with the eight pallets to limit entrance from high-movement regions.
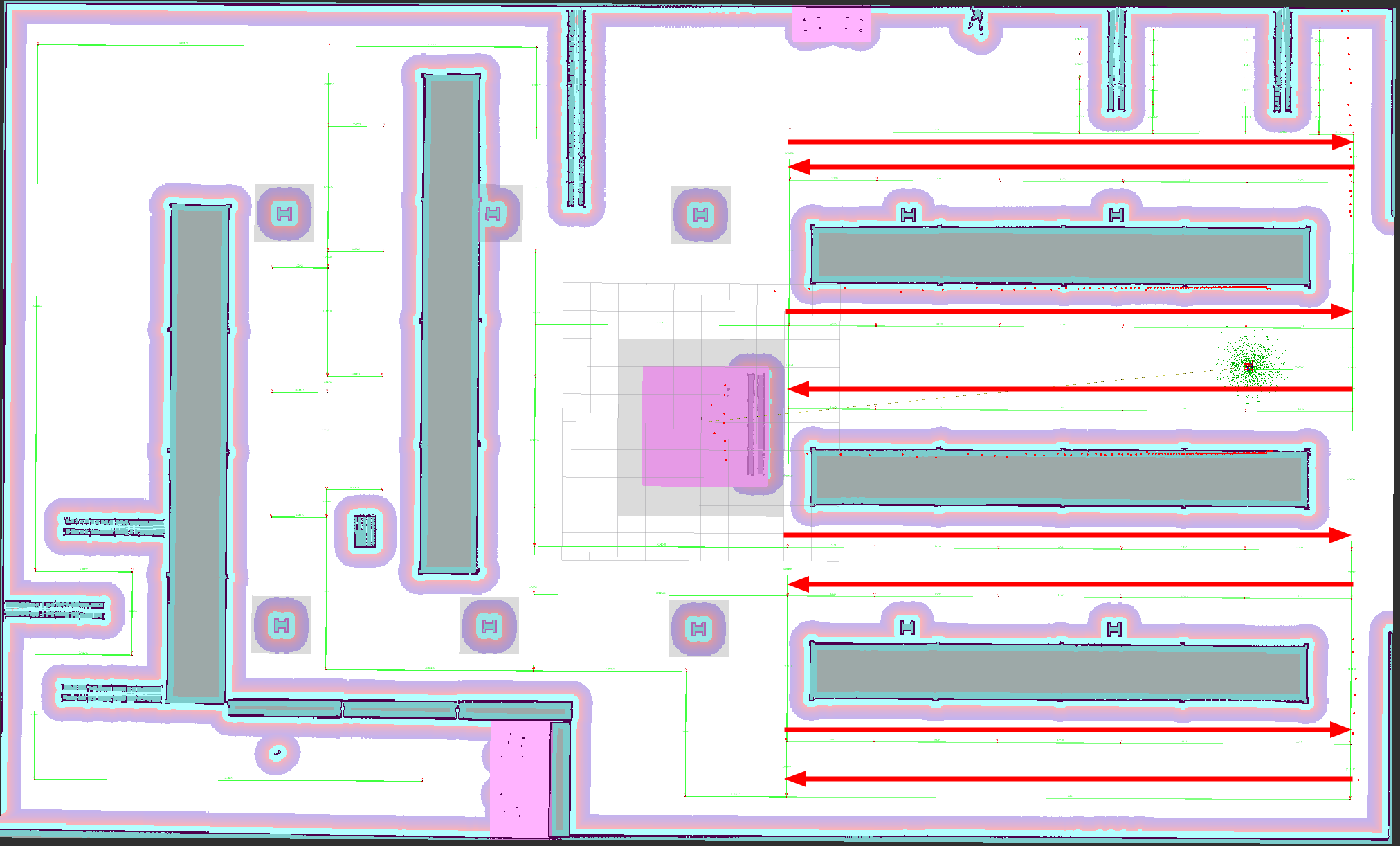
For the warehouse map, the keepout zones were aimed at preventing the robot from planning paths through free chairs and a region of high movement in the middle of the warehouse.
In PR #5146, speed zones were added to the depot and warehouse maps of the Turtlebot4 simulation in Gazebo.
For the depot map, the shelves were encompassed in a speed zone of 75% of the maximum speed and the area around the pallets were limited to 50% of the maximum speed.
For the warehouse map, the area around the beams and the middle of the warehouse were limited to 80% of the maximum speed.
The keepout zones are marked in pink, and the speed zones are marked with grey with proportional opacity to the speed limit.
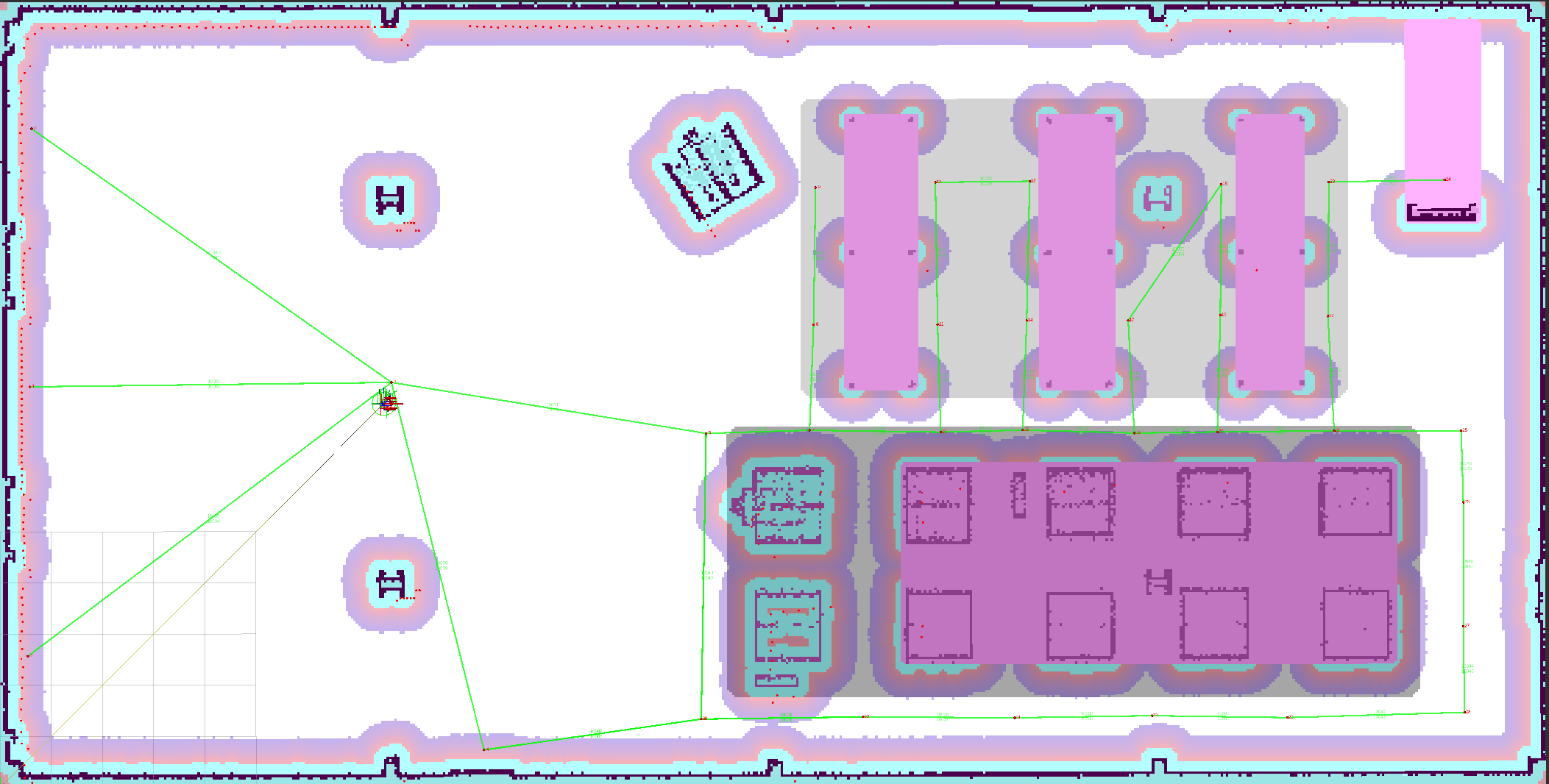
In PR #5160, graph support was added to the warehouse world of the Turtlebot4 simulation in Gazebo. This allows users to visualize the route server in action and test the new features of the route server. The demo includes a simple route with a few waypoints and a graph to follow.
RViz visualization of the route graph for the warehouse environment. All nodes are bidirectional, except the ones that are annotated. Speed zones are marked in grey with proportional opacity of 0.8 to match the speed limit.