Plugin Container Layer Parameters
This implements a costmap layer which combines costmap layers within a submap, which can then be integrated with other submaps in the same parent costmap. An example would be the use of different inflation layers for different sensors, objects, or static layers
<plugin container layer> is the corresponding plugin name selected for this type.
<plugin container layer>.enabledType
Default
bool
True
- Description
Whether it is enabled.
<plugin container layer>.pluginsType
Default
vector<string>
{}
- Description
List of mapped costmap layer names for parameter namespaces and names.
- Note
Costmap filters are presently unsupported
Example
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true
plugins: ["plugin_container_static_layer", "plugin_container_obstacle_layer"]
plugin_container_static_layer:
plugin: "nav2_costmap_2d::PluginContainerLayer"
enabled: True
combination_method: 1
plugins: ["static_layer", "inflation_layer"]
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 2.0
inflation_radius: 0.5
plugin_container_obstacle_layer:
plugin: "nav2_costmap_2d::PluginContainerLayer"
enabled: True
combination_method: 1
plugins: ["obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 1.0
The above example settings, when applied to the Nav2 turtlebot simulation would give the following costmap on startup
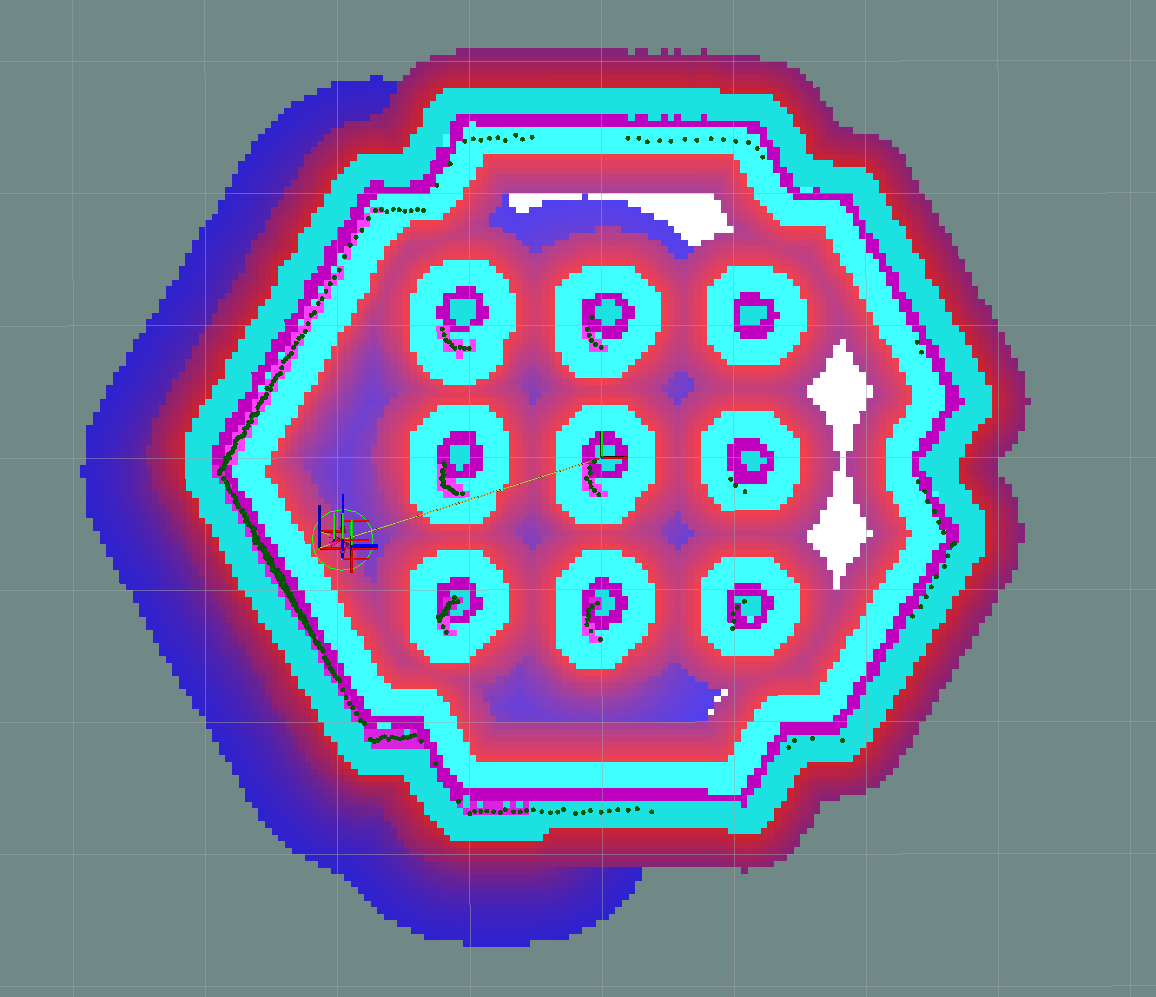
Figure 7 Costmap generated by turtlebot using example plugin container layer settings