Collision Monitor Node
The Collision Monitor is a node providing an additional level of robot safety. It performs several collision avoidance related tasks using incoming data from the sensors, bypassing the costmap and trajectory planners, to monitor for and prevent potential collisions at the emergency-stop level.
This is analogous to safety sensor and hardware features; take in laser scans from a real-time certified safety scanner, detect if there is to be an imminent collision in a configurable bounding box, and either emergency-stop the certified robot controller or slow the robot to avoid such collision. However, this node is done at the CPU level with any form of sensor. As such, this does not provide hard real-time safety certifications, but uses the same types of techniques with the same types of data for users that do not have safety-rated laser sensors, safety-rated controllers, or wish to use any type of data input (e.g. pointclouds from depth or stereo or range sensors).
This is a useful and integral part of large heavy industrial robots, or robots moving with high velocities, around people or other dynamic agents (e.g. other robots) as a safety mechanism for high-response emergency stopping. The costmaps / trajectory planners will handle most situations, but this is to handle obstacles that virtually appear out of no where (from the robot’s perspective) or approach the robot at such high speed it needs to immediately stop to prevent collision.
See the package’s README for more complete information. For more information how to bring-up your own Collision Monitor node, please refer to the Using Collision Monitor tutorial.
Also, the practical demonstration of Collision Monitor abilities presented at 6th ROS Developers Day 2023, could be found below:
Features
The Collision Monitor uses polygons relative the robot’s base frame origin to define “zones”. Data that fall into these zones trigger an operation depending on the model being used. A given instance of the Collision Monitor can have many zones with different models at the same time. When multiple zones trigger at once, the most aggressive one is used (e.g. stop > slow 50% > slow 10%).
The following models of safety behaviors are employed by Collision Monitor:
Stop model: Define a zone and a point threshold. If
min_pointsor more obstacle points appear inside this area, stop the robot until the obstacles will disappear.Slowdown model: Define a zone around the robot and slow the maximum speed for a
slowdown_ratio, ifmin_pointsor more points will appear inside the area.Limit model: Define a zone around the robot and restricts the maximum linear and angular velocities to
linear_limitandangular_limitvalues accordingly, ifmin_pointsor more points will appear inside the area.Approach model: Using the current robot speed, estimate the time to collision to sensor data. If the time is less than
time_before_collisionseconds (0.5, 2, 5, etc…), the robot will slow such that it is now at leasttime_before_collisionseconds to collision. The effect here would be to keep the robot alwaystime_before_collisionseconds from any collision.
The zones around the robot can take the following shapes:
Arbitrary user-defined polygon relative to the robot base frame, which can be static in a configuration file or dynamically changing via a topic interface.
Robot footprint polygon, which is used in the approach behavior model only. Will use the static user-defined polygon or the footprint topic to allow it to be dynamically adjusted over time.
Circle: is made for the best performance and could be used in the cases where the zone or robot footprint could be approximated by round shape.
VelocityPolygon: allow switching of polygons based on the command velocity. This is useful for robots to set different safety zones based on their velocity (e.g. a robot that has a larger safety zone when moving at 1.0 m/s than when moving at 0.5 m/s).
All shapes (Polygon, Circle and VelocityPolygon) are derived from base Polygon class, so without loss of generality they would be called as “polygons”.
Subscribed footprint is also having the same properties as other polygons, but it is being obtained a footprint topic for the Approach Model.
The data may be obtained from different data sources:
Laser scanners (
sensor_msgs::msg::LaserScanmessages)PointClouds (
sensor_msgs::msg::PointCloud2messages)IR/Sonars (
sensor_msgs::msg::Rangemessages)Costmap (
nav2_msgs::msg::Costmapmessages)
Warning
⚠️ when using CostmapSource Collision Monitor normally bypasses the costmap to minimize reaction latency using fresh sensor data. Use at your own caution or when using external costmap sources from derived sources.
Parameters
- enabled
Type
Default
bool
True
- Description:
Sets the initial state. This can come in handy when the robot is docked/inside any of the zones at startup and the node needs to be disabled then. Please note that is not a dynamic parameter, there’s
/toggleservice interface and BT Node to update this state later at runtime.
- base_frame_id
Type
Default
string
“base_footprint”
- Description:
Robot base frame.
- odom_frame_id
Type
Default
string
“odom”
- Description:
Which frame to use for odometry.
- cmd_vel_in_topic
Type
Default
string
“cmd_vel_smoothed”
- Description:
Input
cmd_veltopic with desired robot velocity. Please note, pre-Jazzythis was set tocmd_vel_rawby default.
- cmd_vel_out_topic
Type
Default
string
“cmd_vel”
- Description:
Output
cmd_veltopic with output produced by Collision Monitor velocities.
- state_topic
Type
Default
string
“”
- Description:
Output the currently activated polygon action type and name. Optional parameter. No publisher will be created if it is unspecified.
- transform_tolerance
Type
Default
double
0.1
- Description
Time with which to post-date the transform that is published, to indicate that this transform is valid into the future.
- source_timeout
Type
Default
double
2.0
- Description:
Maximum time interval in which source data is considered as valid. If no new data is received within this interval, the robot will be stopped. Setting
source_timeout: 0.0disables this blocking mechanism. This parameter can be overridden per observation source.
- base_shift_correction
Type
Default
bool
True
- Description:
Whether to correct source data towards to base frame movement, considering the difference between current time and latest source time. If enabled, produces more accurate sources positioning in the robot base frame, at the cost of slower performance. This will cause average delays for
~1/(2*odom_rate)per eachcmd_velcalculation cycle. However, disabling this option for better performance is not recommended for the fast moving robots, where during the typical rate of data sources, robot could move unacceptably far. Thus reasonable odometry rates are recommended (~100 hz).
- stop_pub_timeout
Type
Default
double
1.0
- Description:
Timeout, after which zero-velocity ceases to be published. It could be used for other overrode systems outside Nav2 are trying to bring the robot out of a state close to a collision, or to allow a standing robot to go into sleep mode.
- polygons
Type
Default
vector<string>
N/A
- Description:
List of zones (stop/slowdown/limit bounding boxes, footprint, approach circle, etc…). Causes an error, if not specialized.
- observation_sources
Type
Default
vector<string>
N/A
- Description:
List of data sources (laser scanners, pointclouds, etc…). Causes an error, if not specialized.
- use_realtime_priority
Type
Default
bool
false
- Description
Adds soft real-time prioritization to the controller server to better ensure resources to time sensitive portions of the codebase. This will set the controller’s execution thread to a higher priority than the rest of the system (
90) to meet scheduling deadlines to have less missed loop rates. To use this feature, you use set the following inside of/etc/security/limits.confto give userspace access to elevated prioritization permissions:<username> soft rtprio 99 <username> hard rtprio 99
- enable_stamped_cmd_vel
Type
Default
bool
true
- Description
Whether to use geometry_msgs::msg::Twist or geometry_msgs::msg::TwistStamped velocity data. True uses TwistStamped, false uses Twist. Note: This parameter is default
falsein Jazzy or older! Kilted or newer usesTwistStampedby default.
Polygons parameters
<polygon name> is the corresponding polygon name ID selected for this type.
<polygon_name>.typeType
Default
string
N/A
- Description:
Type of polygon shape. Available values are
polygon,circle. Causes an error, if not specialized.
<polygon_name>.pointsType
Default
string
N/A
- Description:
Polygon vertices, listed in
"[[p1.x, p1.y], [p2.x, p2.y], [p3.x, p3.y], ...]"format (e.g."[[0.5, 0.25], [0.5, -0.25], [0.0, -0.25], [0.0, 0.25]]"for the square in the front). Used forpolygontype. Minimum 3 points for a triangle polygon. If not specified, the collision monitor will use dynamic polygon subscription topolygon_sub_topicfor points in thestop/slowdown/limitaction types, or footprint subscriber tofootprint_topicforapproachaction type.
<polygon_name>.polygon_sub_topicType
Default
string
N/A
- Description:
For
polygontype, topic to listen the polygon points from. Forcircletype, topic to listen the circle radius from. Applicable forstop/slowdown/limitaction types. Causes an error if not specified and static polygon geometry (using parameterpointsforpolygontype orradiusforcircletype) is also not specified. If both static polygon geometry andpolygon_sub_topicare specified, the static parameter takes priority.
<polygon_name>.footprint_topicType
Default
string
“local_costmap/published_footprint”
- Description:
Topic to listen the robot footprint from. Applicable only for
polygontype andapproachaction type. If bothpointsandfootprint_topicare specified, the staticpointstakes priority.
<polygon_name>.polygon_subscribe_transient_localType
Default
bool
False
- Description:
QoS durability setting for the incoming polygon or footprint topic subscription.
<polygon_name>.radiusType
Default
double
N/A
- Description:
Circle radius. Used for
circletype. If not specified, the collision monitor will use dynamic polygon subscription topolygon_sub_topicfor circle radius in thestop/slowdown/limitaction types.
<polygon_name>.action_typeType
Default
string
N/A
- Description:
Zone behavior model. Available values are
stop,slowdown,limit,approach. Causes an error, if not specialized.
<polygon_name>.min_pointsType
Default
int
4
- Description:
Minimum number of data readings within a zone to trigger the action. Former
max_pointsparameter for Humble, that meant the maximum number of data readings within a zone to not trigger the action).min_pointsis equal tomax_points + 1value.
<polygon_name>.trigger_consecutive_pointsType
Default
int
1
- Description:
Number of consecutive processing cycles with
points_inside >= min_pointsrequired to enter the triggered state. A value of1means trigger in a single processing cycle.
<polygon_name>.release_consecutive_pointsType
Default
int
1
- Description:
Number of consecutive processing cycles with
points_inside < min_pointsrequired to leave the triggered state. A value of1means release in a single processing cycle. In practice, values greater than1can reduce sensor noise flicker while remaining responsive.
<polygon_name>.slowdown_ratioType
Default
double
0.5
- Description:
Robot slowdown (share of its actual speed). Applicable for
slowdownaction type.
<polygon_name>.linear_limitType
Default
double
0.5
- Description:
Robot linear speed limit. Applicable for
limitaction type.
<polygon_name>.angular_limitType
Default
double
0.5
- Description:
Robot angular speed limit. Applicable for
limitaction type.
<polygon_name>.time_before_collisionType
Default
double
2.0
- Description:
Time before collision in seconds. Maximum simulation time used in collision prediction. Higher values mean lower performance. Applicable for
approachaction type.
<polygon_name>.simulation_time_stepType
Default
double
0.1
- Description:
Time iteration step for robot movement simulation during collision prediction. Higher values mean lower prediction accuracy but better performance. Applicable for
approachaction type.
<polygon_name>.visualizeType
Default
bool
False
- Description:
Whether to publish the polygon in a separate topic.
<polygon_name>.polygon_pub_topicType
Default
string
<polygon_name>
- Description:
Topic name to publish a polygon to. Used only if
visualizeis true.
<polygon_name name>.enabledType
Default
bool
True
- Description:
Whether to use this polygon for collision monitoring. (Can be dynamically set)
VelocityPolygon parameters
All previous Polygon parameters apply, in addition to the following unique parameters for VelocityPolygon.
<vel_poly>.holonomicType
Default
bool
False
- Description:
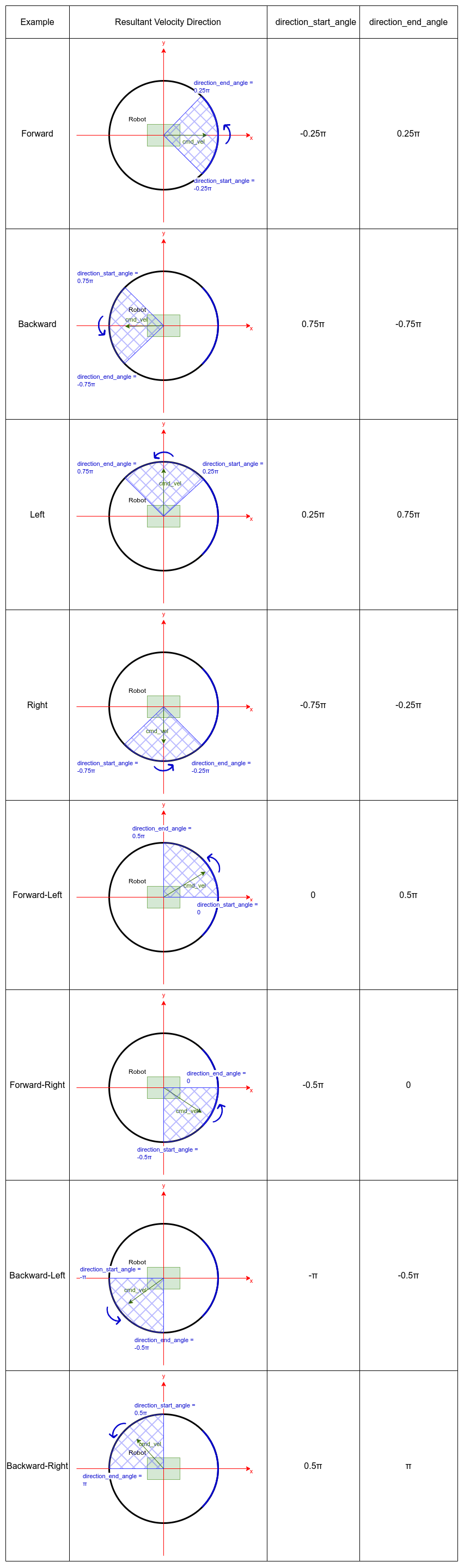
Whether to use holonomic or non-holonomic robot model for collision prediction. For holonomic robot model, the resultant velocity will be used to compare the linear velocity range. Additionally, there will be 2 more parameters,
direction_start_angleanddirection_end_angle, to specify the resultant velocity direction.
<vel_poly>.velocity_polygonsType
Default
vector<string>
N/A
- Description:
List of sub polygons for switching based on the robot’s current velocity. When velocity is covered by multiple sub polygons, the first sub polygon in the list will be used. Causes an error, if not specified.
<vel_poly>.<subpoly>.pointsType
Default
vector<string>
N/A
- Description:
Polygon vertices, listed in
"[[p1.x, p1.y], [p2.x, p2.y], [p3.x, p3.y], ...]"format (e.g."[[0.5, 0.25], [0.5, -0.25], [0.0, -0.25], [0.0, 0.25]]"for the square in the front). Used forpolygontype. Minimum 3 points for a triangle polygon. Causes an error, if not specified.
<vel_poly>.<subpoly>.linear_minType
Default
double
N/A
- Description:
Minimum linear velocity for the sub-polygon. Causes an error, if not specified.
Non-holonomic: This is the minimum signed velocity along the x-axis (allows negative values for reverse motion).
Holonomic: This is the minimum magnitude of the resultant velocity, which must be
>= 0.0.
<vel_poly>.<subpoly>.linear_maxType
Default
double
N/A
- Description:
Maximum linear velocity for the sub polygon. Causes an error, if not specified.
Non-holonomic: This is the maximum signed velocity along the x-axis. (allows negative values for reverse motion).
Holonomic: This is the maximum magnitude of the resultant velocity, which must be
>= 0.0.
<vel_poly>.<subpoly>.theta_minType
Default
double
N/A
- Description:
Minimum angular velocity for the sub polygon. Causes an error, if not specified.
<vel_poly>.<subpoly>.theta_maxType
Default
double
N/A
- Description:
Maximum angular velocity for the sub polygon. Causes an error, if not specified.
<vel_poly>.<subpoly>.direction_start_angleType
Default
double
-PI
- Description:
Start angle of the movement direction(for holonomic robot only). Refer to the Example section for the common configurations. Applicable for holonomic mode only.
<vel_poly>.<subpoly>.direction_end_angleType
Default
double
PI
- Description:
End angle of the movement direction(for holonomic robot only). Refer to the Example section for the common configurations. Applicable for holonomic mode only.
Observation sources parameters
<source name> is the corresponding data source name ID selected for this type.
<source name>.typeType
Default
string
“scan”
- Description:
Type of polygon shape. Could be
scan,pointcloud,range,polygonorcostmap.
<source name>.transport_typeType
Default
string
“raw”
- Description:
For
pointclouddata, specify the transport plugin to use:
raw: No compression. Default; highest bandwidth usage.
draco: Lossy compression via Google.
zlib: Lossless compression via Zlib compression.
zstd: Lossless compression via Zstd compression.
See the known transports for more details.
<source name>.topicType
Default
string
“scan”
- Description:
Topic to listen the source data from.
<source name>.min_heightType
Default
double
0.05
- Description:
Minimum height the PointCloud projection to 2D space started from. Applicable for
pointcloudtype.
<source name>.max_heightType
Default
double
0.5
- Description:
Maximum height the PointCloud projection to 2D space ended with. Applicable for
pointcloudtype.
<source name>.use_global_heightType
Default
bool
false
- Description:
Set true for pointcloud sources containing a “height” field relative to a real world ground contour. The “height” field will be used for the min and max height checks instead of the “z” field and will not be transformed as it is assumed that height is already global frame referenced. Applicable for
pointcloudtype.
<source name>.min_rangeType
Default
double
0.0
- Description:
Minimum range threshold for PointCloud points. Points closer than this distance (measured as Euclidean distance from sensor origin) will be filtered out before processing. Useful for eliminating noise and invalid readings very close to the sensor. Applicable for
pointcloudtype.
<source name>.obstacles_angleType
Default
double
PI / 180 (1 degree)
- Description:
Angle increment (in radians) between nearby obstacle points at the range arc. Two outermost points from the field of view are not taken into account (they will always exist regardless of this value). Applicable for
rangetype.
<source name>.sampling_distanceType
Default
double
0.1
- Description:
Internally the polygon is sampled for collision detection. sampling_distance is the distance between sampled points of the polygon. Applicable for
polygonsource type.
<source name>.enabledType
Default
bool
True
- Description:
Whether to use this source for collision monitoring. (Can be dynamically set)
<source name>.source_timeoutType
Default
double
(node parameter
source_timeoutvalue)- Description:
Maximum time interval in which source data is considered as valid. If no new data is received within this interval, the robot will be stopped. Setting
source_timeout: 0.0disables this blocking mechanism. Overrides node parameter for each source individually, if desired.
<source name>.cost_thresholdType
Default
int
253
- Description:
For
costmapsources only. Minimum cell cost (0–255) to be treated as an obstacle. By default this matches inscribed/lethal cells (253–254) and ignores lower-cost cells.
<source name>.treat_unknown_as_obstacleType
Default
bool
true
- Description:
For
costmapsources only. Iftrue, cells with cost255(NO_INFORMATION) will also be turned into obstacle points. Set tofalseif your costmap has large unknown areas you don’t want to trigger Collision Monitor.
- bond_heartbeat_period
Type
Default
double
0.25
- Description
The lifecycle node bond mechanism publishing period (on the /bond topic). Disabled if inferior or equal to 0.0.
- allow_parameter_qos_overrides
Type
Default
bool
true
- Description
Whether to allow QoS profiles to be overwritten with parameterized values.
Example
Here is an example illustrating the common configurations for holonomic robots that cover multiple directions of the resultant velocity:
Here is an example of configuration YAML for the Collision Monitor.
collision_monitor:
ros__parameters:
enabled: True
base_frame_id: "base_footprint"
odom_frame_id: "odom"
cmd_vel_in_topic: "cmd_vel_smoothed"
cmd_vel_out_topic: "cmd_vel"
state_topic: "collision_monitor_state"
transform_tolerance: 0.5
source_timeout: 5.0
base_shift_correction: True
stop_pub_timeout: 2.0
enable_stamped_cmd_vel: True # False for Jazzy or older
use_realtime_priority: false
polygons: ["PolygonStop", "PolygonSlow", "FootprintApproach"]
PolygonStop:
type: "circle"
radius: 0.3
action_type: "stop"
min_points: 4 # max_points: 3 for Humble
visualize: True
polygon_pub_topic: "polygon_stop"
enabled: True
PolygonSlow:
type: "polygon"
points: "[[1.0, 1.0], [1.0, -1.0], [-0.5, -1.0], [-0.5, 1.0]]"
action_type: "slowdown"
min_points: 4 # max_points: 3 for Humble
slowdown_ratio: 0.3
visualize: True
polygon_pub_topic: "polygon_slowdown"
enabled: True
PolygonLimit:
type: "polygon"
points: "[[0.5, 0.5], [0.5, -0.5], [-0.5, -0.5], [-0.5, 0.5]]"
action_type: "limit"
min_points: 4 # max_points: 3 for Humble
linear_limit: 0.4
angular_limit: 0.5
visualize: True
polygon_pub_topic: "polygon_limit"
enabled: True
FootprintApproach:
type: "polygon"
action_type: "approach"
footprint_topic: "/local_costmap/published_footprint"
time_before_collision: 2.0
simulation_time_step: 0.02
min_points: 6 # max_points: 5 for Humble
visualize: False
enabled: True
VelocityPolygonStop:
type: "velocity_polygon"
action_type: "stop"
min_points: 6
visualize: True
enabled: True
polygon_pub_topic: "velocity_polygon_stop"
velocity_polygons: ["rotation", "translation_forward", "translation_backward", "stopped"]
holonomic: false
rotation:
points: "[[0.3, 0.3], [0.3, -0.3], [-0.3, -0.3], [-0.3, 0.3]]"
linear_min: 0.0
linear_max: 0.05
theta_min: -1.0
theta_max: 1.0
translation_forward:
points: "[[0.35, 0.3], [0.35, -0.3], [-0.2, -0.3], [-0.2, 0.3]]"
linear_min: 0.0
linear_max: 1.0
theta_min: -1.0
theta_max: 1.0
translation_backward:
points: "[[0.2, 0.3], [0.2, -0.3], [-0.35, -0.3], [-0.35, 0.3]]"
linear_min: -1.0
linear_max: 0.0
theta_min: -1.0
theta_max: 1.0
# This is the last polygon to be checked, it should cover the entire range of robot's velocities
# It is used as the stopped polygon when the robot is not moving and as a fallback if the velocity
# is not covered by any of the other sub-polygons
stopped:
points: "[[0.25, 0.25], [0.25, -0.25], [-0.25, -0.25], [-0.25, 0.25]]"
linear_min: -1.0
linear_max: 1.0
theta_min: -1.0
theta_max: 1.0
observation_sources: ["scan", "pointcloud"]
scan:
source_timeout: 0.2
type: "scan"
topic: "/scan"
enabled: True
pointcloud:
type: "pointcloud"
topic: "/intel_realsense_r200_depth/points"
transport_type: "raw" # raw or/ with compression (zlib, draco, zstd)
min_height: 0.1
max_height: 0.5
min_range: 0.2
enabled: True
# costmap:
# type: "costmap" # relative, respects namespaces
# topic: "local_costmap/costmap"
# cost_threshold: 254
# enabled: True
# treat_unknown_as_obstacle: True