AdaptiveToleranceGoalChecker
The adaptive tolerance goal checker uses two underlying goal tolerances a fine and a coarse one. The fine tolerance is used to instantly trigger goal reached when the robot is close to the goal (functionally same as simple goal checker), while the coarse tolerance is used to trigger goal reached when the robot is further from the goal but is making no meaningful progress towards it (or not expected to).
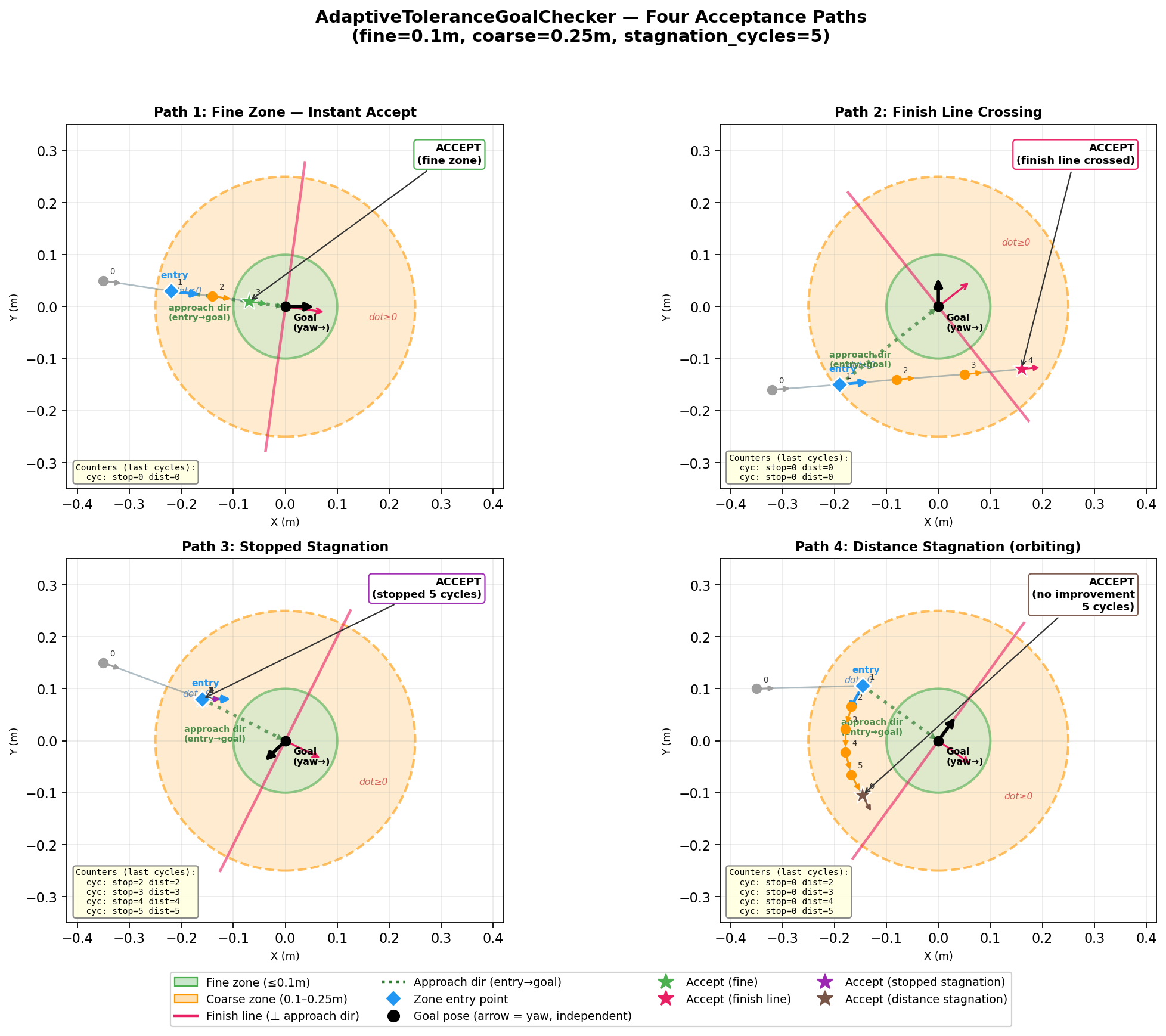
- The goal is cosidered reached when one of the following conditions is met:
The robot is within the fine goal tolerance
The robot is within the coarse goal tolerance and its linear velocity and orientational velocity are below a specified threshold for a set amount of cycles
The robot is within the coarse goal tolerance and robots distance to the goal is not improving for a set amount of cycles
The robot is within the coarse goal tolerance and it has passed the finish line (the line perpendicular to the first robot pose within the coarse tolerance and passing through the goal pose)
When stateful is enabled, the XY goal reached state is preserved after one of the above conditions has been satisfied. See xy_goal_tolerance_buffer for configuring the hysteresis behavior.
Parameters
<nav2_controller plugin>: nav2_controller plugin name defined in the goal_checker_plugin_id parameter in Controller Server.
<nav2_controller plugin>.fine_xy_goal_toleranceType
Default
double
0.10
- Description
Fine (desired) XY tolerance to the goal (m). When the robot’s XY distance to the goal is within this tolerance, the goal is considered reached immediately (subject to the yaw check). Should be smaller than
coarse_xy_goal_tolerance.
<nav2_controller plugin>.coarse_xy_goal_toleranceType
Default
double
0.25
- Description
Coarse (fallback) XY tolerance to the goal (m). When the robot is within this tolerance but outside the fine tolerance, the goal is considered reached only if one of the coarse-tier acceptance conditions fires (stopped stagnation, distance stagnation, or finish-line crossing). Should be larger than
fine_xy_goal_tolerance.
<nav2_controller plugin>.xy_goal_tolerance_bufferType
Default
double
0.0
- Description
Hysteresis buffer for stateful XY position checking (m). When
statefulis true, after the XY goal condition has been satisfied, the robot may drift within the corresponding accepted tolerance plus this buffer without rechecking the XY position. If the robot moves outside this buffered region, the previous XY reached state is cleared and the XY position must be checked again.
<nav2_controller plugin>.yaw_goal_toleranceType
Default
double
0.25
- Description
Tolerance on the yaw angle to the goal orientation (rad). The goal is only considered reached once the XY check passes AND the yaw error is within this tolerance.
<nav2_controller plugin>.path_length_toleranceType
Default
double
1.0
- Description
Maximum remaining transformed global plan length above which the goal check is skipped (m). Prevents premature goal acceptance when the robot is still far from the goal along the path.
<nav2_controller plugin>.statefulType
Default
bool
true
- Description
If true, once the XY tolerance is satisfied the checker latches that result and only re-evaluates yaw on subsequent cycles. If false, both XY and yaw are re-checked every cycle.
<nav2_controller plugin>.symmetric_yaw_toleranceType
Default
bool
false
- Description
If true, the yaw check accepts both the goal orientation and its 180° opposite (useful for symmetric robots that can drive forward or backward). If false, only the goal orientation is accepted.
<nav2_controller plugin>.trans_stopped_velocityType
Default
double
0.10
- Description
Linear velocity threshold below which the robot is considered “stopped” for the stopped-stagnation acceptance path (m/s). Combined with
rot_stopped_velocityandrequired_stagnation_cycles.
<nav2_controller plugin>.rot_stopped_velocityType
Default
double
0.10
- Description
Angular velocity threshold below which the robot is considered “stopped” for the stopped-stagnation acceptance path (rad/s). Combined with
trans_stopped_velocityandrequired_stagnation_cycles.
<nav2_controller plugin>.required_stagnation_cyclesType
Default
int
15
- Description
Number of consecutive controller cycles for which a stagnation condition must hold before the coarse-tier acceptance fires. Applies to both stopped stagnation (velocity below threshold) and distance stagnation (no improvement in distance to goal). Must be
>= 1.
Example
controller_server:
ros__parameters:
goal_checker_plugins: ["goal_checker"]
goal_checker:
plugin: "nav2_controller::AdaptiveToleranceGoalChecker"
fine_xy_goal_tolerance: 0.10
coarse_xy_goal_tolerance: 0.25
xy_goal_tolerance_buffer: 0.10
yaw_goal_tolerance: 0.25
path_length_tolerance: 1.0
stateful: true
symmetric_yaw_tolerance: false
trans_stopped_velocity: 0.10
rot_stopped_velocity: 0.10
required_stagnation_cycles: 15