AxisGoalChecker
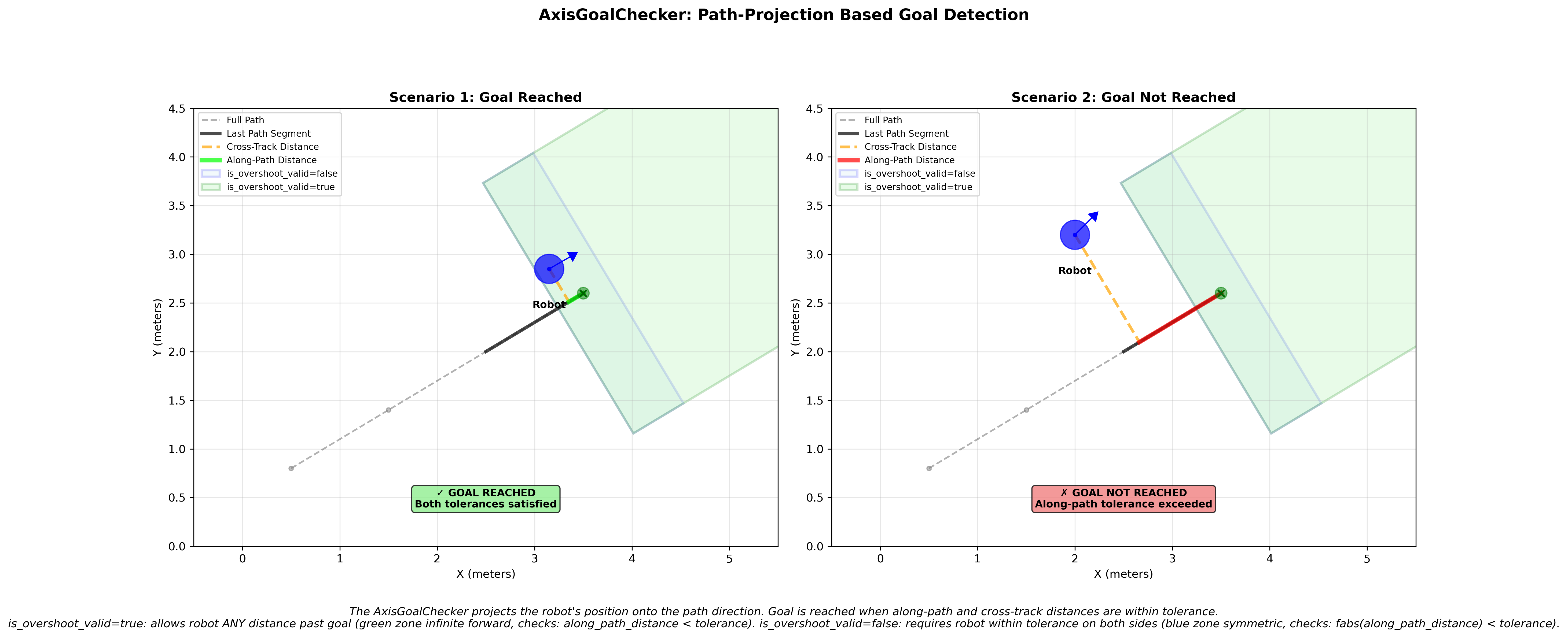
Checks whether the robot has reached the goal pose by projecting the robot’s position onto the path direction defined by the last segment of the path. This goal checker uses the last two poses of the path (before_goal_pose and goal_pose) to determine the path direction and then checks if the robot is within tolerance along that axis.
Unlike simple distance-based goal checkers, the AxisGoalChecker allows independent control of tolerances along the path direction (along_path_tolerance) and perpendicular to it (cross_track_tolerance). This is particularly useful for applications where precise alignment along a specific axis is more important than radial distance from the goal.
Parameters
<nav2_controller plugin>: nav2_controller plugin name defined in the goal_checker_plugin_id parameter in Controller Server.
<nav2_controller plugin>.along_path_toleranceType
Default
double
0.25
- Description
Tolerance for the projected distance along the path direction (m). This checks how far ahead or behind the goal the robot is when projected onto the path axis.
<nav2_controller plugin>.cross_track_toleranceType
Default
double
0.25
- Description
Tolerance for the perpendicular distance from the path direction (m). This checks how far to the left or right of the path axis the robot is.
<nav2_controller plugin>.path_length_toleranceType
Default
double
1.0
- Description
Maximum path length to consider for goal checking (m). If the remaining path length exceeds this value, the goal check is skipped. This prevents premature goal acceptance when far from the goal.
<nav2_controller plugin>.is_overshoot_validType
Default
bool
false
- Description
Whether to allow overshooting past the goal along the path direction. When false (default), uses
fabs(projected_distance) < along_path_tolerancefor symmetric tolerance. When true, usesprojected_distance < along_path_tolerance, allowing the robot to be any distance past the goal but still requiring it to be within tolerance if before the goal.